はじめに - ユーザーサポートPhotoRobot
PhotoRobot Controls App(以下「CAPP」)は、コンテンツ制作プロセス(画像、動画、360度、3Dモデル)を自動化するように設計されています。このガイドは4つのセクションで構成されており、それぞれがプロセスを表しています。
- セットアップ - ワークスペースを作成: カメラ、ハードウェア、およびプロジェクト
- CAPTURE - ハードウェアとカメラPhotoRobot制御し、画像やビデオをキャプチャ
- 編集 - 後処理ビジュアルコンテンツ
- PUBLISH - 複数の形式で出力イメージを生成する、「プロファイルを管理する」
PhotoRobotコントロール アプリのインストール
PhotoRobot コントロール アプリをコンピューターにインストールするには、PhotoRobot アカウントにログインし、PhotoRobot ダウンロードに移動します。
手記: CAPP の 安定版 と プレビュー版 はどちらも、インストーラーウィザードからダウンロードできます。安定版には最新バージョンの CAPP が含まれており、頻繁にバージョンがリリースされます。一方、CAPPのプレビューバージョンでは、開発から数日以内に安定版に移行する最新の機能と修正への早期アクセスが提供されます。これにより、安定版で報告されたほとんどの問題はプレビュー版ですでに解決されているため、ユーザーはサポートに連絡する前にプレビュー版で発生した問題をテストできます。ただし、プレビュー バージョンは、安定性が重要な要素である運用環境での使用には推奨されないことに注意してください。プレビュー バージョンは開発中ですが、まだ不完全な機能や未解決のバグが含まれている可能性があります。
大事な:古いバージョンの CAPP は、データベースが破損するリスクがあるため、顧客またはパブリック配布を目的としていません。古いバージョンのCAPPは、社内開発または非常に特殊なユースケースのために、認定されたPhotoRobot技術者のみがアクセスできます。
CAPP の最新の安定バージョンとプレビューバージョンを見つけるには、CAPP 最新ダウンロードバージョンを参照してください。
セルフインストールのサポートとトラブルシューティング
インストール プロセスは、インストーラー ファイルをダウンロードすることから始まります。
CAP のインストール要件に注意してください。
- ユーザーは、CAPP をインストールするコンピューターに対する管理者権限を持っている必要があります。
- コンピュータは、すべての PhotoRobot システムおよびハードウェア要件を満たしている必要があります。
- コンピューターは、最新の更新プログラムが適用されたサポートされているオペレーティング システムを実行している必要があります。
大事な: また、CAPPはロボット制御機能だけでなく、カメラやライトなどの周辺機器のドライバも構成されていることにも注意してください。その結果、最新のMac OSバージョンがすぐにサポートされないことがよくあります。ただし、これが発生した場合は、関連するすべてのベンダーが互換性のあるライブラリをリリースするまで、一時的なものにすぎません。
これは不便かもしれませんが、CAPP を使用する際の互換性の問題よりもはるかに不便ではありません。また、ダウングレードは、時期尚早のアップグレードを回避するよりもさらに複雑です。
OSとシステムの要件を満たしたら、インストーラーウィザードを介してインストールを進めます。PhotoRobot アカウントにログインし、以下の手順でセットアップを進めます。
セットアップ
ユーザーの同意確認
CAPPをダウンロードする場合、新しいユーザーアカウントをアクティブ化するには、エンドユーザーライセンス契約(EULA)およびその他の関連ドキュメントをユーザーが確認する必要があります。
アカウントの有効化後、アカウントプロファイル設定のクラウドバージョンのCAPPを介して、送信された同意情報を確認できます。
同意情報を確認するには、CAPPのクラウドバージョンを開き、インターフェースの右上隅にあるユーザーアカウントアイコンをクリックします。次に、メニューオプションから [マイプロファイル ]を選択します。

プロフィールメニューには、プロフィール写真、一般的なユーザー情報(名前、電話番号、会社)、パスワード設定、同意情報が表示されます。同意情報には、次のものが含まれます。
- コンピューターのホスト名
- 合意日(Agreed on Date)
- PhotoRobot国際プログラムライセンス契約
- 個人データ処理への同意
- 個人データの処理に関する情報
互換性のあるカメラ
大事な:CAPPがカメラと正しく通信するように、カメラに接続されている他のすべてのプログラムを閉じてください。また、PhotoRobot対応カメラモデルのリストから互換性のあるカメラを必ず使用してください。
注: PhotoRobot Controls App 2.5.4のリリースにより、サードパーティのカメラ統合を介してあらゆるカメラがサポートされるようになりました。ただし、自動写真撮影には、最新のミラーレスCanonカメラモデルが最も信頼性が高く効率的です。
PhotoRobotが推奨するハンドヘルドカメラをWi-Fiまたはケーブル接続で使用することは可能ですが、それを行うと問題が発生する可能性があります。
- Wi-Fiが頻繁に切断される場合があります(主にタイムアウトが原因)。これらには、時間のかかるシステムへの再接続が必要です。
- ケーブル接続でハンドヘルドカメラを使用する場合、ケーブルの長さが複雑になり、接続にリスクが生じます。
PhotoRobot Touchアプリを介したiPhone接続の場合、これらの問題は発生しないことに注意してください。iPhoneは、連続照明を使用するセットアップで手持ち撮影が可能です。ただし、フラッシュ撮影が必要な場合は、互換性のある手持ちカメラが推奨されるミラーレスカメラの代替として機能します。Wi-Fiおよび有線手持ちモデルで発生する可能性のある問題に留意してください。
互換性のあるライト
CAPPが照明と通信するには、PhotoRobot互換のスタジオライトを使用してください。これには、FOMEIおよびBroncolorのストロボライトと、DMXをサポートするあらゆる種類のLEDライトの2種類のライトが含まれます。
リモートサポート設定
PhotoRobot Controls のインストール直後に、ユーザーはSplashtop SOS (EU地域) アプリをダウンロードしてインストールすることをお勧めします。Splashtop SOS (EU) を使用すると、ユーザーが特定のCASEの許可を与えた後、PhotoRobotの技術者が顧客のコンピューターにアクセスし、技術支援を提供できます。
PhotoRobot Controlsと同時にSplashtop SOSをダウンロードすることで、リモートテクニカルサポートのリクエストの遅延を回避できます。例えば、ユーザーがアプリケーションをインストールする十分な権限を持っていない場合などです。Splashtopをインストールした後、当社の技術者はSplashtop Businessを使用して、テクニカルサポートのリクエストがあるコンピューターに即座にアクセスできます。
ただし、ユーザーはSplashtop SOSアプリのEU地域版をダウンロードする必要がありますのでご注意ください。米国地域版アプリでは、当社の技術者がお客様のコンピューターにアクセスできません。
したがって、以下のEU地域リンクを使用してSplashtop SOSをダウンロードしていることを確認してください。
注: PhotoRobot システムのリモートサポートの設定に関する詳細については、PhotoRobot リモートサポート設定を参照してください。
ワークスペースの作成
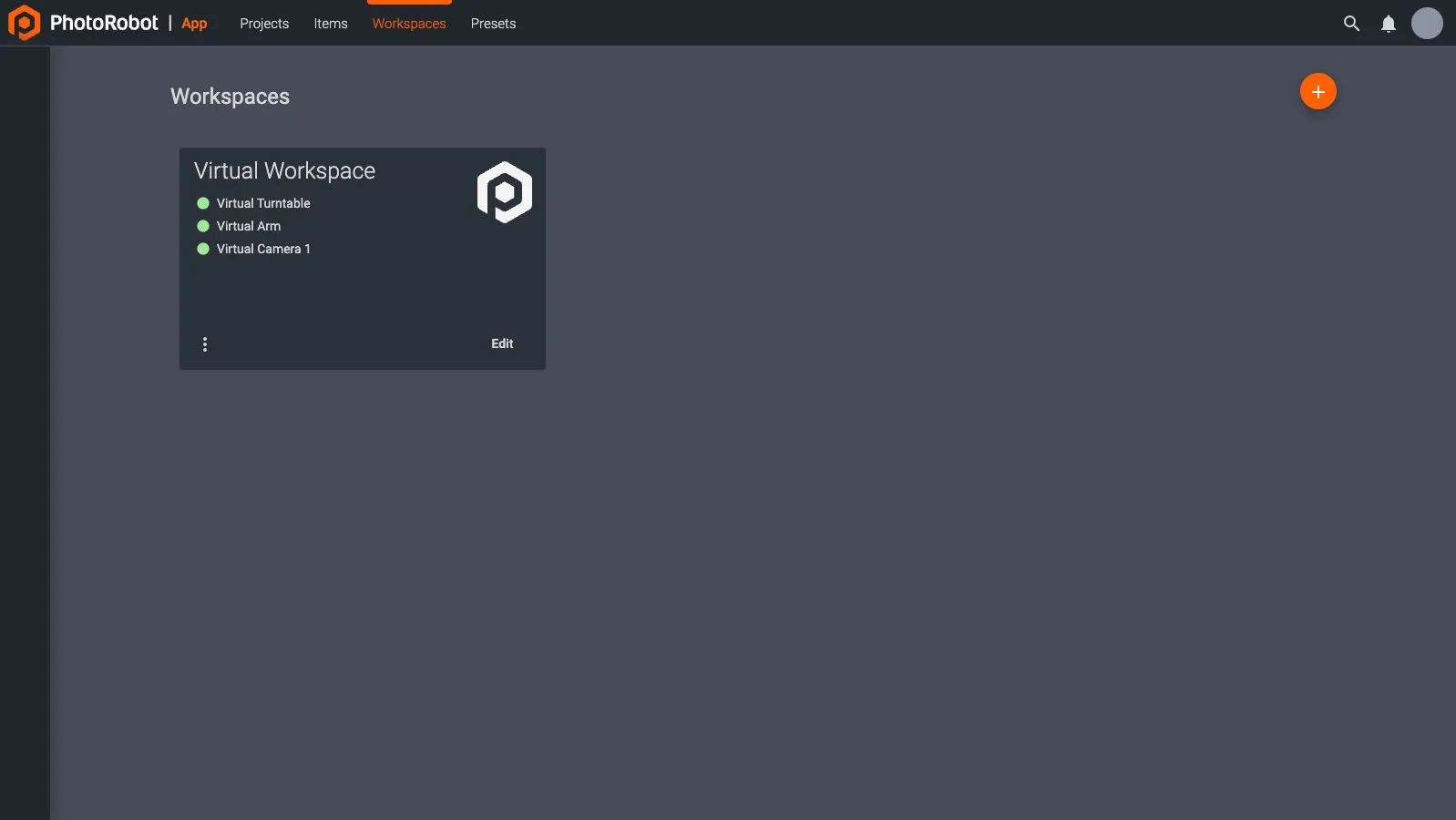
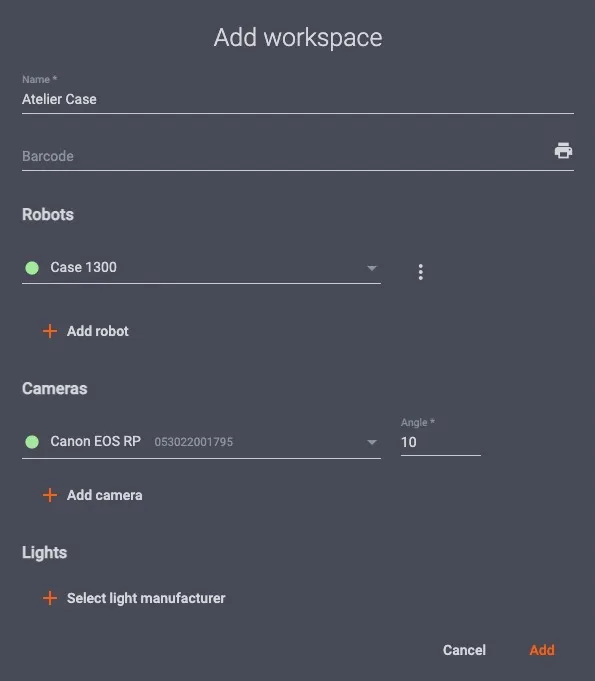
CAPP を開いた後、通常は、まずワークスペースを作成します。ワークスペースは、特定の写真撮影に使用されているハードウェアのリストです。さまざまなPhotoRobotモジュール、カメラ、ライト、その他のアクセサリを含めることができます。
デモの目的で、ユーザーは仮想ハードウェアを使用するように構成された定義済みのサンプル ワークスペースを使用できます。このように、仮想ロボットやカメラを選択することで、CAPPのさまざまな機能を試すことができます。
ハードウェアの接続
(仮想ハードウェアではなく)実際のハードウェアの使用を開始するには、まず、ハードウェアがPhotoRobotの制御に使用しているコンピューターと同じコンピューターネットワーク(またはサブネットワーク)に接続されていることを確認します。
注: PhotoRobot Controlsバージョン2.5.4以降、サードパーティ製カメラ統合を通じてあらゆるカメラがサポートされるようになりました。一方、互換性のあるカメラには、さまざまなCanonカメラモデル、当社の推奨Wi-Fi対応Canonカメラ、およびPhotoRobot Touchアプリを使用している場合はiPhoneカメラも含まれます。
重要: ロボットワークステーションによる自動撮影の場合、PhotoRobotが推奨するミラーレスCanonカメラモデルが最も信頼性があります。Wi-Fiまたはケーブル接続によるハンドヘルドカメラのサポートはありますが、その使用は問題を引き起こす可能性があります。これには、頻繁なWi-Fi切断(主にタイムアウトによる)、ケーブル長の複雑さ、および接続へのリスクが含まれます。
カメラを接続するには、次の3つの方法のいずれかで、ロボットと同じローカルコンピューターネットワークに接続する必要があります。
- USB経由でローカルエリアネットワークに直接接続します。
- 特別なWi-Fiプロトコルを介した推奨されるハンドヘルドカメラの接続(キヤノン開発者ページのキヤノンツールアプリケーションでアクセス可能)。
- PhotoRobot Touchアプリケーションを介した1つまたは複数のiPhoneの統合。(PhotoRobotでiPhoneを使用する方法については、iPhoneタッチアプリのユーザーマニュアルを参照してください。
ハードウェア(またはカメラ)をワークスペースに接続した後、それがオンラインであるか(CAPPによって認識されているか)を確認できます。これを行うには、指定された機器の名前の左側にある点を確認します。デバイスが認識されている場合、緑色の点が表示されます。
デバイス名の横にある灰色の点は、ハードウェアが認識されていないか、電源が入っていないことを示します。赤い点がある場合は、ユーザーがカメラをマニュアルモードに切り替えていないなどのエラーが発生しています。エラーの原因を特定するには、赤い点の上にマウスを重ねると、発生しているエラーの説明が表示されたツールチップが表示されます。
ハードウェアを接続してワークスペースをセットアップする完全なステップバイステップのチュートリアルについては、PhotoRobotワークスペースのセットアップを参照してください。
問題が発生した場合は、一般的な問題とその解決策についてPhotoRobotトラブルシューティングを参照してください。
ロボットアームの高さ設定
ワークスペースでロボットアームを使用する場合は、追加のセットアップが必要になる可能性があることに注意してください。これは、ロボットアームが独立した機械であり、CAPPを介して制御する機能の一つとして、昇降運動によって回転軸が撮影対象物の高さの中点に揃うというものがあります。
ロボットアームの回転軸の高さは、ワークステーションの機械タイプによって決定され、同時にレベリングフィートの調整によって決定され、床の凹凸を補正します。すべてが正しく設定されていれば、機械は水平になり、回転中心は床から特定の高さにあります。ただし、全体の高さはターンテーブルの表面の高さにも依存し、ロボットによって異なります。これは、ロボットアームの列の下に高さアダプターがあり、ほぼ揃うように高さの参照に不一致がある可能性があることを意味します。
完璧な位置合わせを確保するためには、アームとターンテーブルの高さ差をCAPPに入力する必要があります。高さの差は、ロボットアームの回転軸とターンテーブルの表面が配置されている高さ(その上に置かれた追加のボードを含む)との間の正確な距離を測定します。これにより、システムがオブジェクトの高さの半分を計算するための正確な寸法と、アームが移動する位置が提供されます。また、システムが 自動的かつ正しく動作するように設定されていることも保証します。
また、次の点にも注意してください。システムは、特定のセットアップの有効範囲外の値を拒否するように設定されています。
ロボットアームエレベーターをゼロレベルに設定
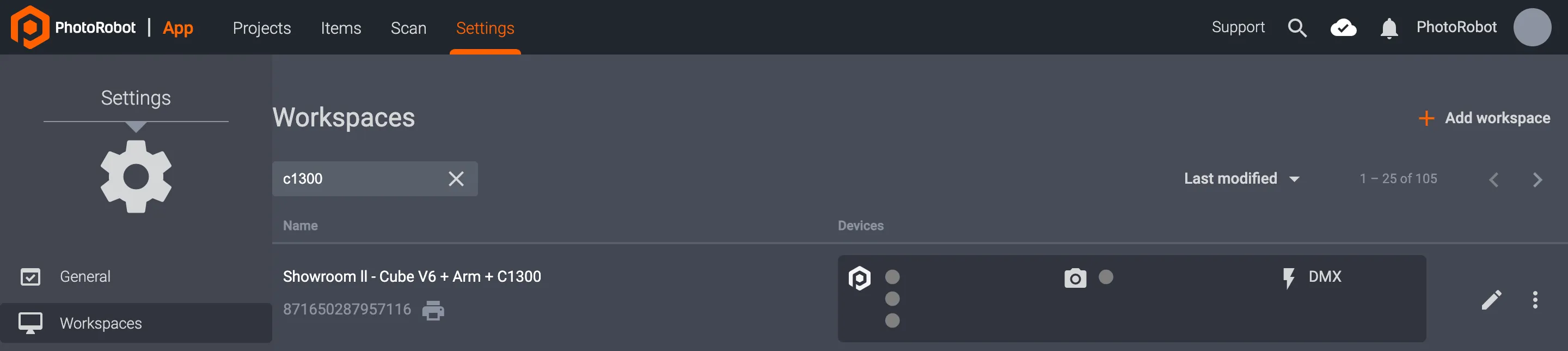
Robot Armエレベーターをゼロレベルに設定するには、まずCAPPのローカルバージョンを開き、ワークスペース設定に次の2つの方法のいずれかでアクセスします。
1. CAPP のローカル バージョンを開き、インターフェイスの上部にある [設定 ] をクリックして、左側のメニュー オプションから [ワークスペース ] を選択します。 このメニューで、動作中のワークスペースを見つけ、ワークスペース タイトルの横にある編集アイコンをクリックして [ ワークスペースの編集] 設定を開きます。
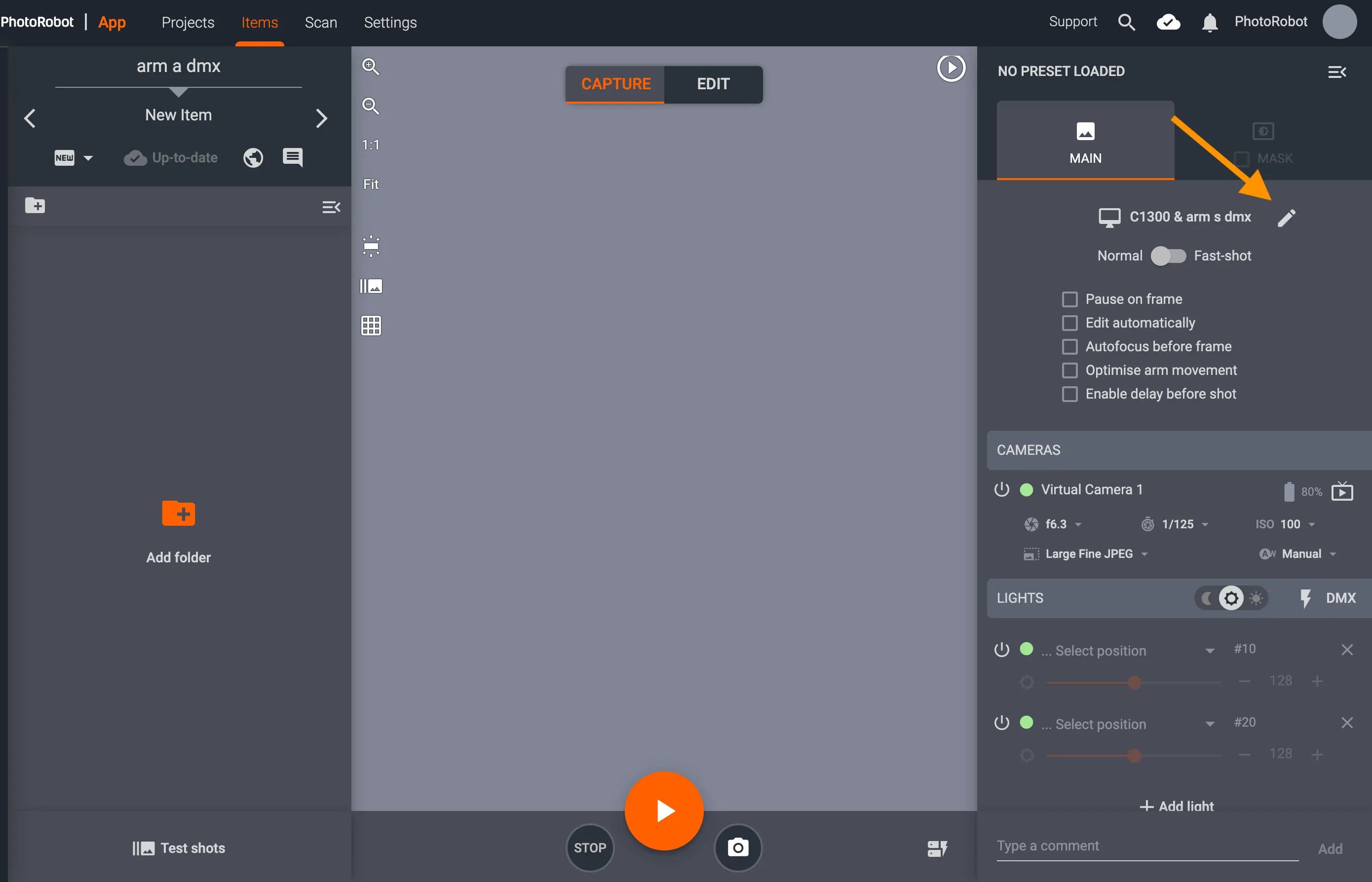
2. または、CAPPのローカルバージョンで キャプチャモードでアイテム を開き、インターフェースの右側にある ワークスペース タイトルの横にある編集アイコンをクリックして、ワークスペースの編集メニューにアクセスすることもできます。
どちらの方法でも、 ワークスペース設定の編集が開きます。次に、ロボットアームを設定するには、[ ロボット ]メニューでデバイスを見つけ、ロボットアーム名の横にある3つの垂直ドットをクリックします。
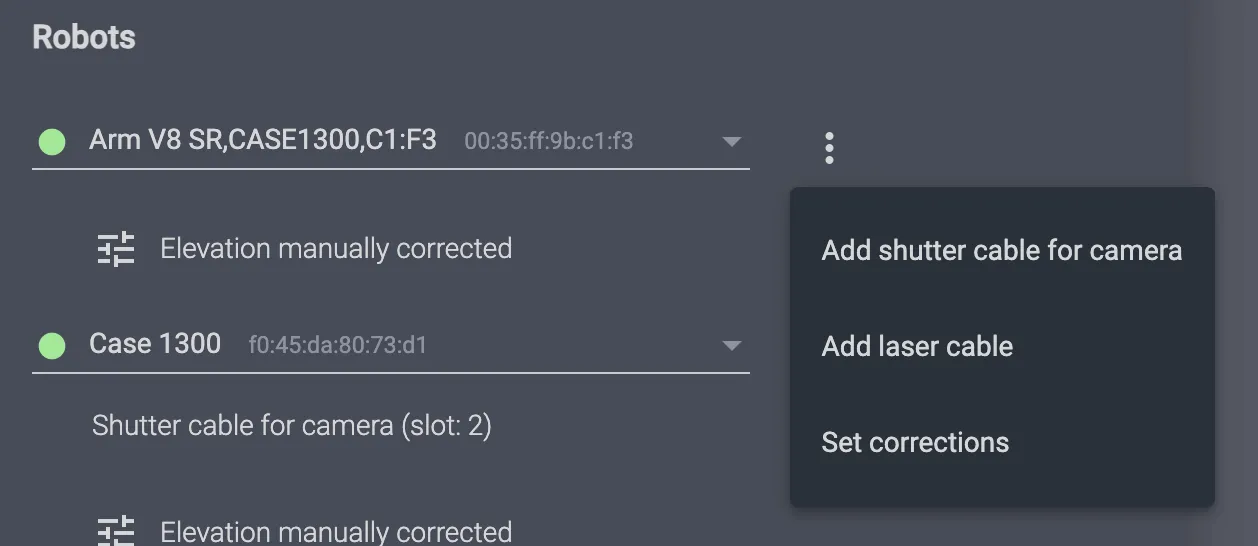
次に、メニューオプション[ 修正の設定] を選択して、[ エレベーター補正の設定 ]機能を開きます。
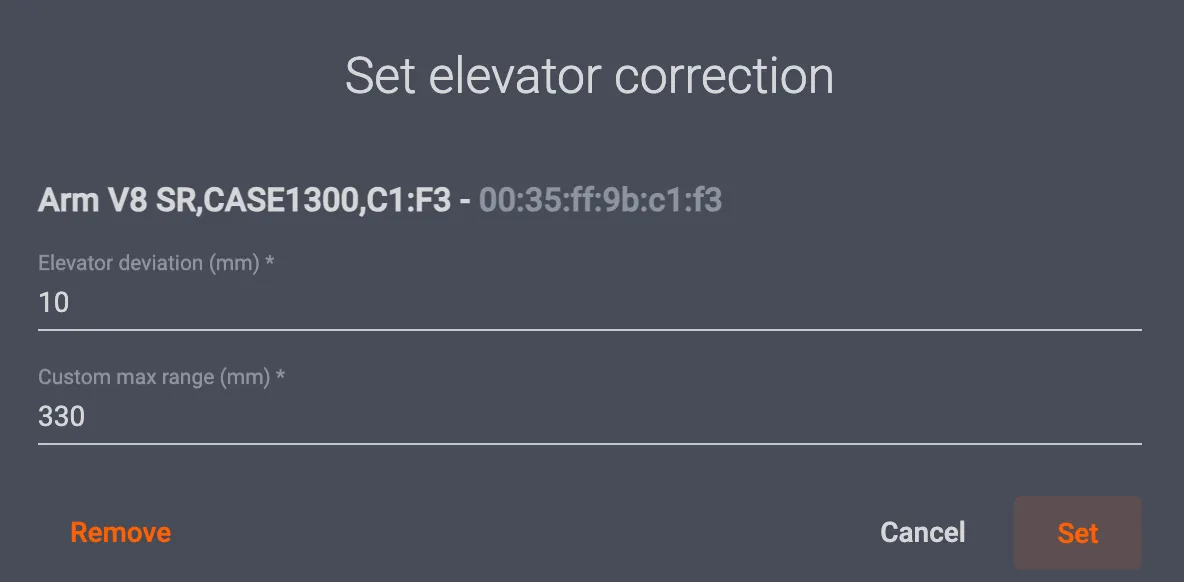
[Set elevator correction] メニューで、上部のフィールドの [Elevator deviation (mm)] の数値を調整して、カメラの高さを適切なゼロ レベルに設定します。たとえば、カメラがテーブルから 10 mm 上から中心からずれている場合は、[エレベーターの偏差] を -10 mm に設定してカメラを中央に配置します。
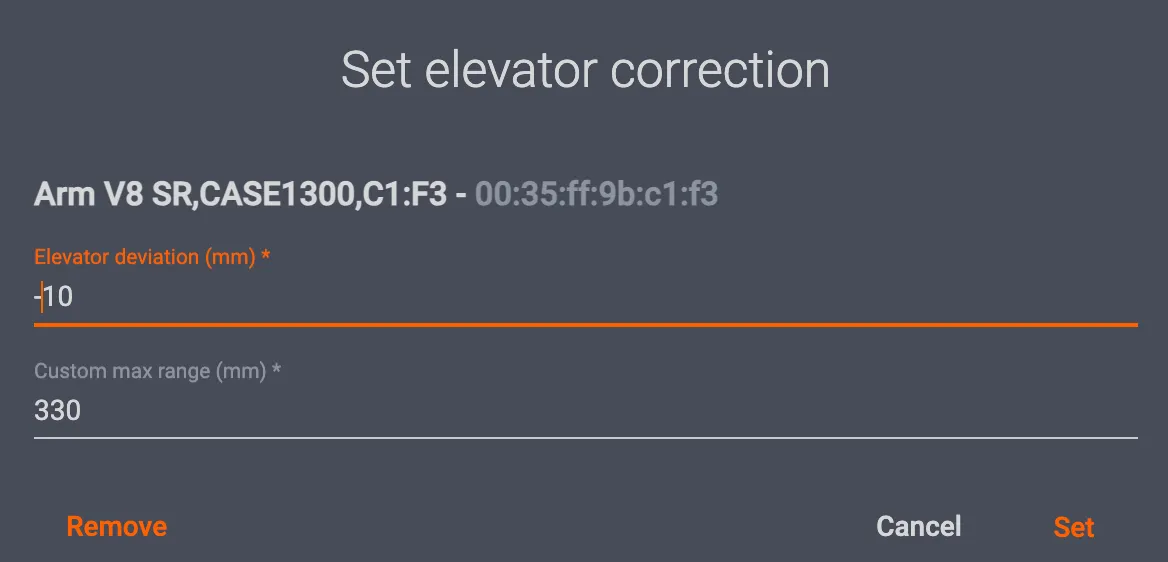
カメラがテーブルから10 mm離れている場合は、エレベーターの偏差を+10 mmに設定します。これにより、ロボットアームに取り付けられたカメラの高さが、ソフトウェアの適切なゼロレベルに正しく位置合わせされます。
手記: リフトは最大330mmに達することができます。したがって、ゼロレベルを+ 30 mm調整すると、最大リフトは300 mmにしか達しません。つまり、システムはこのマージンで小さい製品 (30 mm 以下) のみをキャプチャできます。
ファイルの管理 - プロジェクト、アイテム、およびフォルダ
CAPP では、イメージはプロジェクト、アイテム、およびフォルダに整理されます。
- プロジェクトは、最上位レベルのデータ エンティティです。通常、プロジェクトには、単一の写真撮影または 1 回の撮影日/週のアイテムが含まれます。
- プロジェクトは、1 つ以上の 項目で構成されます。通常、1 つのアイテムは、特定の撮影されたオブジェクトになります。
- アイテムには、1 つ以上の フォルダーが含まれています。CAPP では、異なる種類のイメージを分離するために、1 つのアイテムに複数のフォルダーを含めることができます。非常に一般的な例は、360°回転プレゼンテーション("spin"と呼ばれる)用のフォルダを1つ持ち、別のフォルダを使用して静止画(「静止画」)を保存することです。
撮影を開始するには、まず新しいプロジェクト(使用するプロジェクトがすでにある場合を除く)と、少なくとも1つのアイテムを追加する必要があります。
( ! ) - 問題が発生した場合は、PhotoRobotトラブルシューティングマニュアルでカメラ、ロボット、ライトの接続、および編集に関する追加のサポートを見つけてください。
一般設定 - クラウド自動バックアップ、処理、タッチアプリ
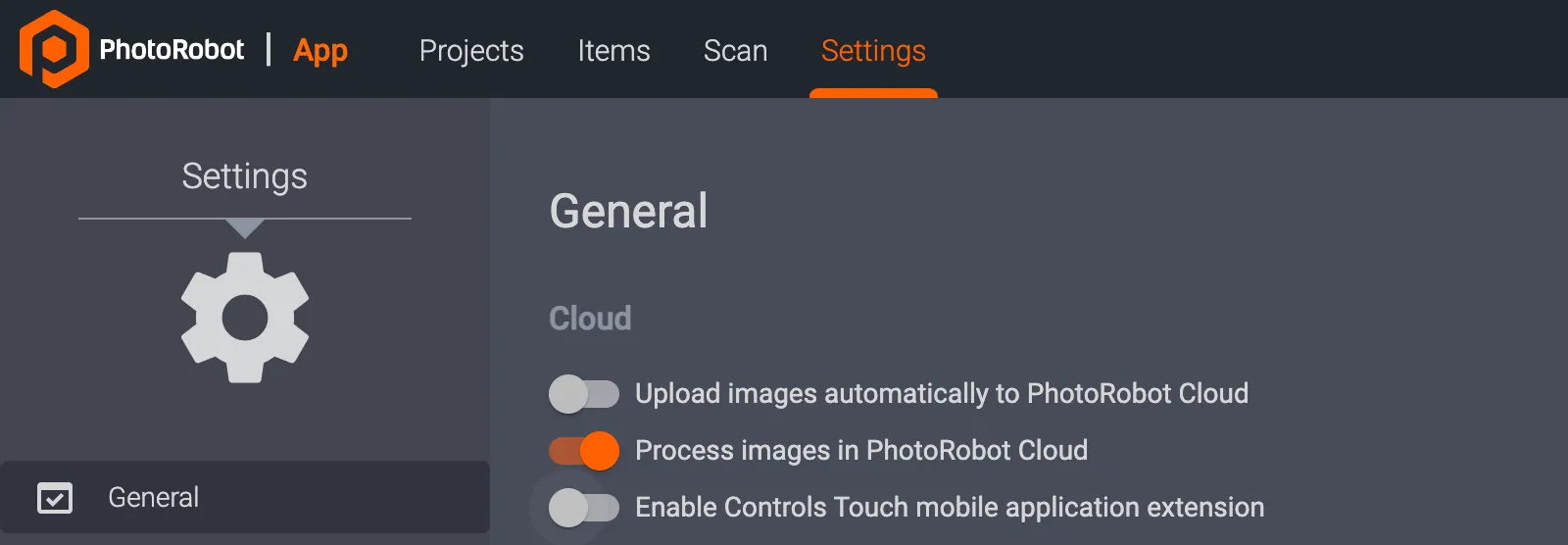
CAPP のローカル デスクトップ バージョンでは、オンとオフを切り替える 3 つの一般設定があります。
- PhotoRobot Cloudに画像を自動的にアップロード
- PhotoRobot Cloudで画像を処理する
- Enable Controls Touch Mobile Application Extension
デフォルトでは、ローカルアプリは画像を自動的にPhotoRobot Cloudにアップロードするように設定されています。この機能は、キャプチャした画像のバックアップをクラウドサーバーに自動的に保存し、後でエクスポートできるようにします。
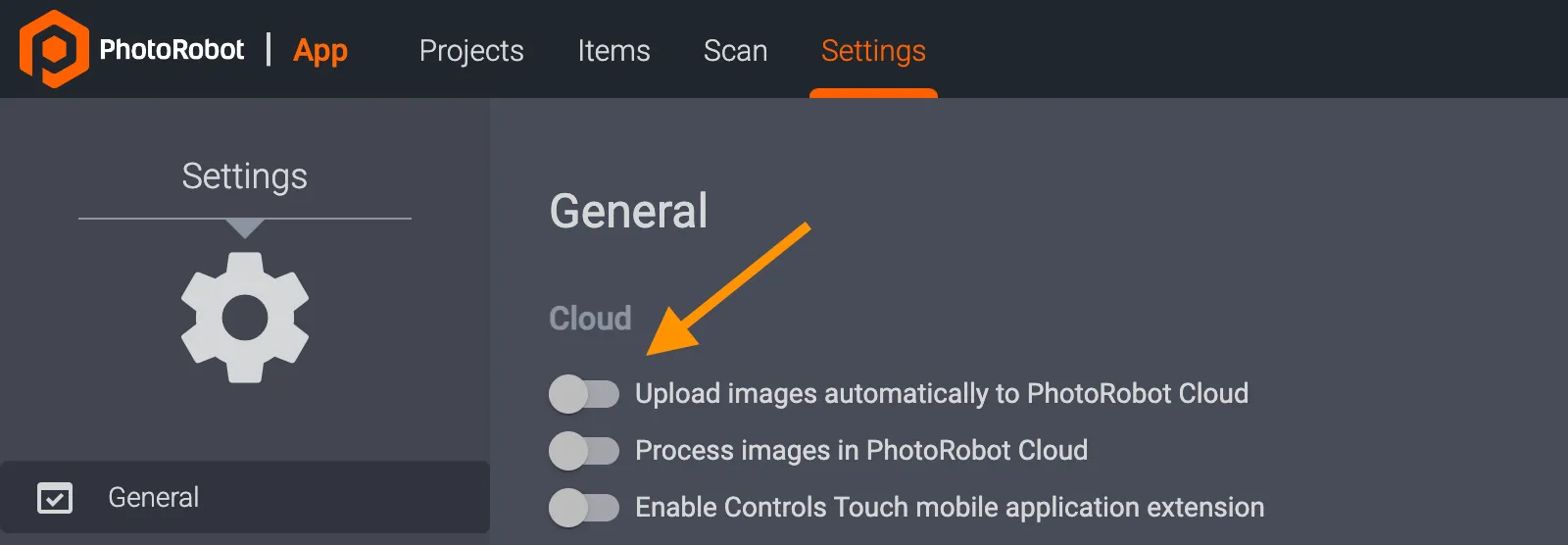
PhotoRobot Cloudに画像を自動的にアップロードを無効にするには、CAPPの一般設定のローカルバージョンでオプションをオフに切り替えます。これにより、キャプチャしたアイテムがローカルアプリまたは自分のクラウドアカウントに保存されます。
トグルを使用して、PhotoRobot Cloudで画像を処理する機能を有効または無効にすることもできます。オンにすると、この機能はキャプチャ後にPhotoRobot Cloudのプリセットに従って画像を自動的に後処理します。
iPhone用のPhotoRobot Touchモバイルアプリケーションを使用している場合は、[コントロールTouchモバイルアプリケーション拡張機能を有効にする]をオンに切り替えます。
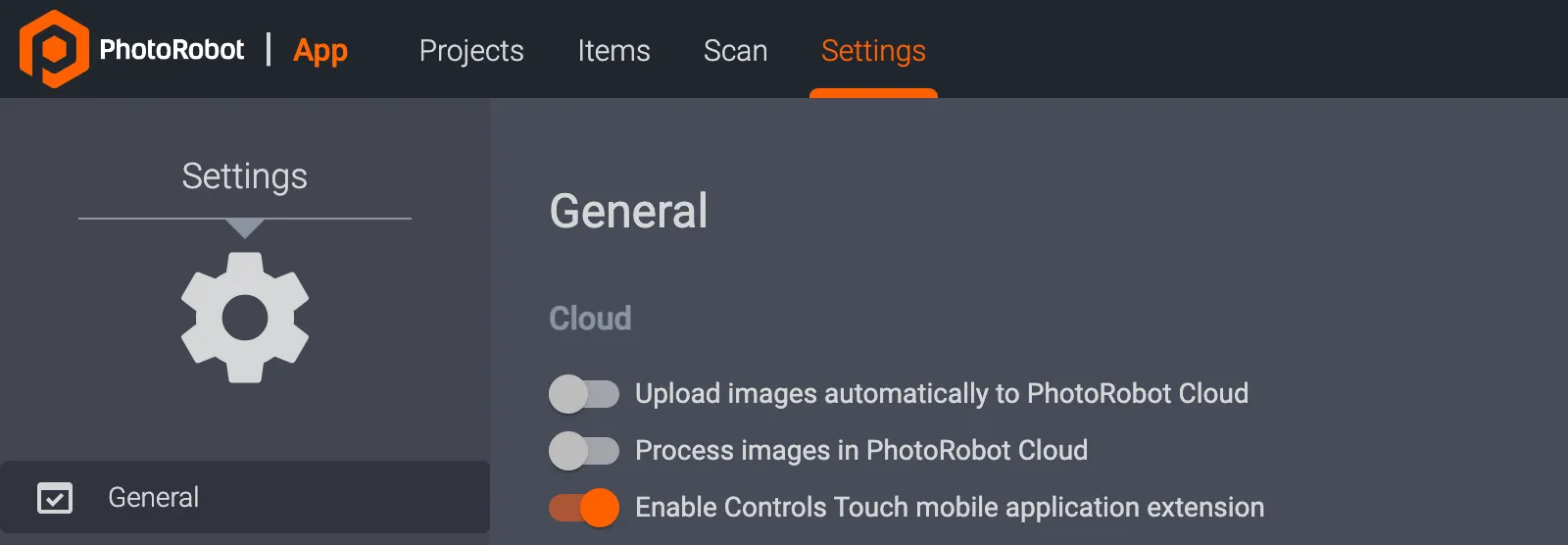
手記:PhotoRobot Touchのインストールと操作に関する技術的な手順については、PhotoRobot iPhoneTouchアプリのユーザーマニュアルを参照してください。
一般設定 - 新規項目の自動作成
さらに、CAPP のローカルデスクトップバージョンの一般設定には、バーコードリーダーの詳細オプションを構成できる バーコードスキャナー 設定があります。不明 なバーコードがスキャンされたときにシステムに新しいアイテムを自動的に作成する の 左側にあるトグルを使用して、アイテムの自動作成を有効または無効にします。
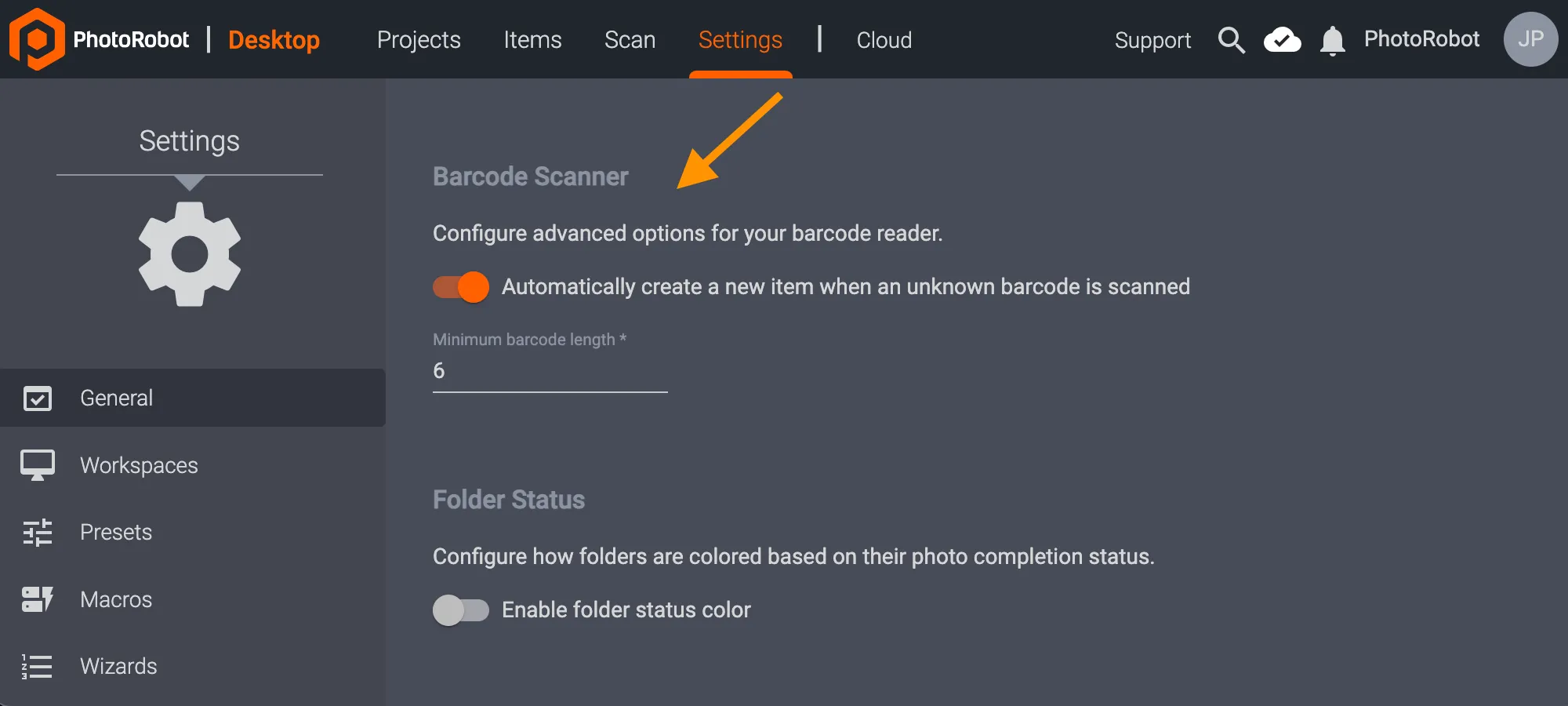
アクティブにすると、この設定は手動でアイテムを作成する代わりに機能します。これにより、キャプチャ時点でアイテムを識別できます (通常はバーコードまたは QR コードを介して)。オペレーターが不明なコードをスキャンするだけで、プロジェクトに新しいアイテムが自動的に作成されます。アイテムの命名は、スキャンされた文字列とアイテムの識別子フィールドに従って行われます。次に、オペレーターはアイテムの写真を撮ります。
こうすることで、スタジオソフトウェア内でインベントリ関連の操作を実行する必要がなくなります。たとえば、新しいアイテムをスキャンし、その後、写真のプリセット(棚)コードをスキャンするだけで十分です(たとえば、白、暗い、またはカラフルなアイテムの場合)。その後、システムは写真の完全なセットを自動的かつ即座に配信し、それらを完全に後処理し、自動命名でターゲットシステムに配布します。
さらに、CAPP バージョン 2.13.beta58 以降、バーコードの最小文字列長を設定するオプションが追加されました。以前は、バーコード/QRコードの最小長は6文字でした(スキャンされた文字列の二重解釈を避けるため)。現在、バーコードの最小長設定は調整可能で、たとえば、4文字の識別子をさらに調整することなく機能させることができます。
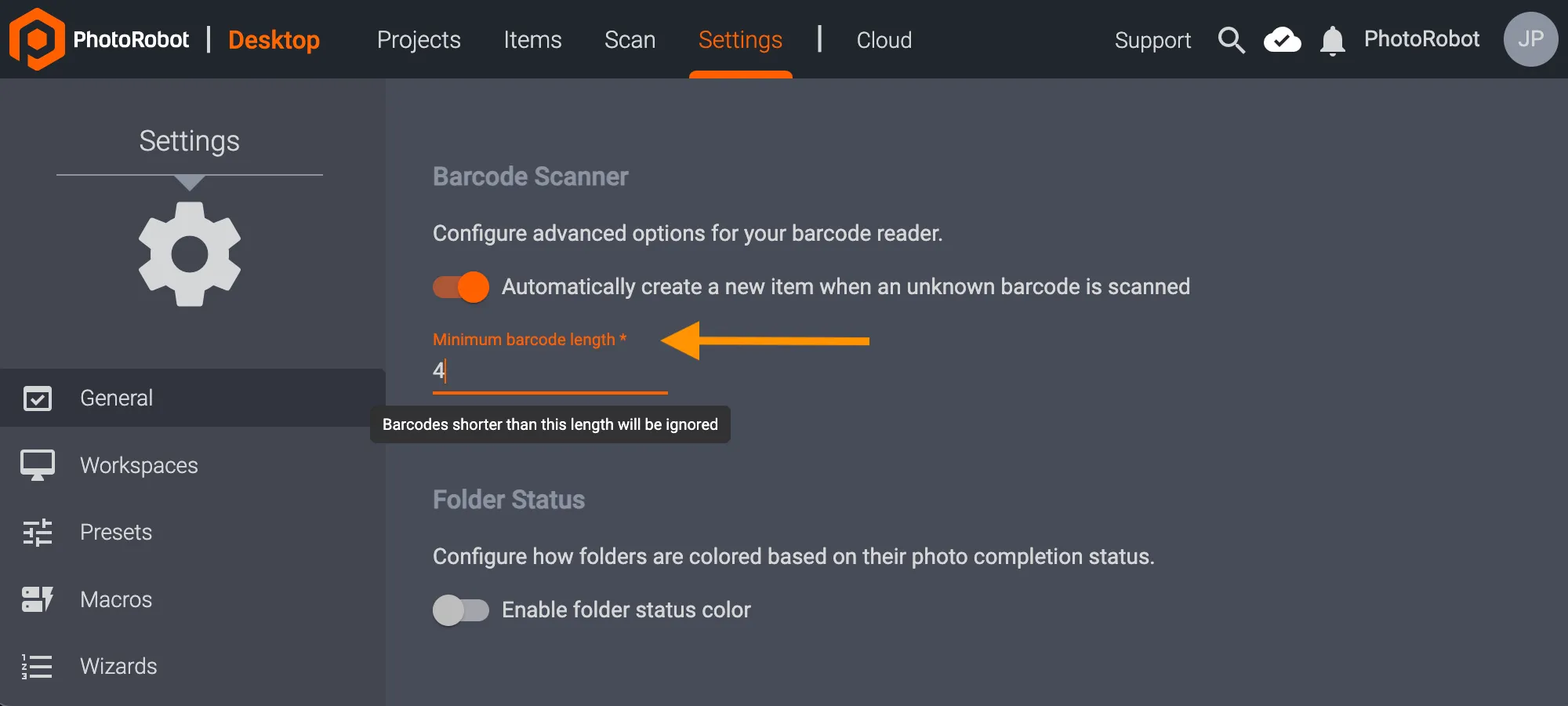
バーコード/QRコードの最小文字列長を調整するには、CAPPのローカルバージョンの一般設定 - バーコードスキャナーでも最小バーコード長を設定します。入力された長さよりも短いバーコードは、システムによって無視されます。
手記: システムでアイテムにバーコードが割り当てられると、バーコードボタンを介してアイテム情報領域のキャプチャモードインターフェイスでバーコードに直接アクセスすることもできます。
プロジェクトデータへの顧客外部アクセス権の付与
有料 CAPP アカウントの組織外の顧客と連携するために、アカウントの管理者は クライアント アカウントを無料で作成できます。クライアントアカウントを使用すると、外部の顧客はプロジェクトデータを表示したり、レビューやコメントを通じて品質保証に参加したり、ダウンロード用のプロジェクトアセットにアクセスしたりすることができます。この機能は、フォト スタジオが特定のジョブへのアクセスを必要とする外部顧客と作業している場合を対象としています。
組織外の顧客とプロジェクトを共有するには、まず、管理者権限を持つユーザープロファイルを使用してクラウドバージョンのCAPPにログインしてください。
1. 管理者権限を持つ有料の CAPP アカウント プロファイルを使用してクラウドベースのアプリにログインし、ダッシュボードの右上隅にあるユーザー プロファイル メニュー アイコンをクリックします。次に、[ 組織] をクリックして管理パネルにアクセスします。
2. 次に、[組織管理] パネルで、ユーザー インターフェイスの上部にあるアカウント オプションから [ ユーザー ] をクリックします。

3. [クライアント] をクリックして、アカウント インターフェイスからクライアントの追加機能にアクセスするための新しいユーザー オプションを作成します。[ + クライアントの追加 ] ボタンは、ダッシュボードの右上のユーザー プロファイル アイコンの下に表示されます。
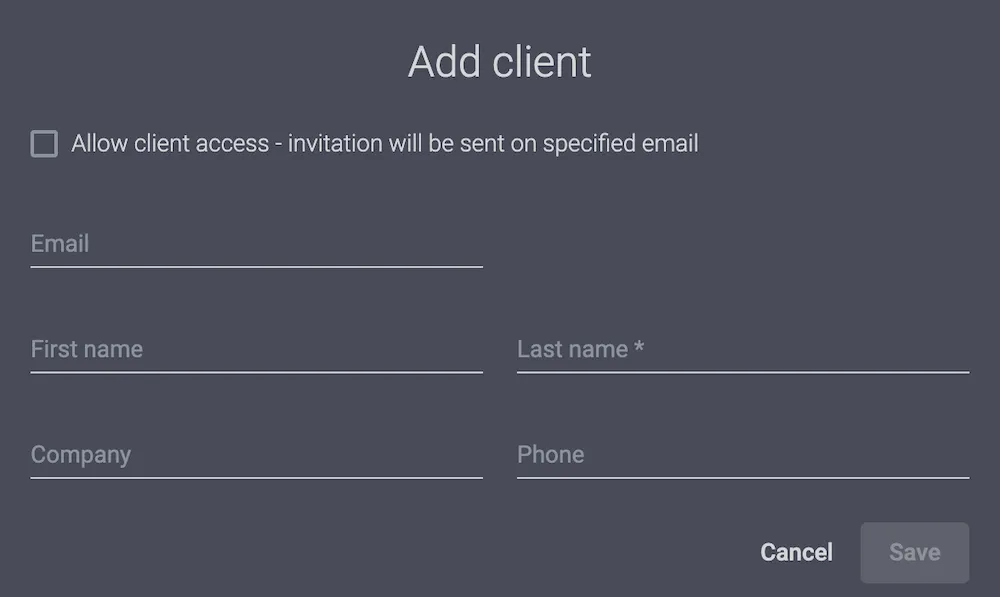
4. ユーザープロファイルアイコンの下にある [+クライアントの追加 ]をクリックします。
5. クライアントの情報(電子メール、名前、会社、電話番号)のフィールドに入力し、[ クライアントアクセスを許可する]チェックボックスをオンにします。情報が正確であるかどうかを確認し、[ 保存] をクリックしてクライアントを CAPP に追加します。
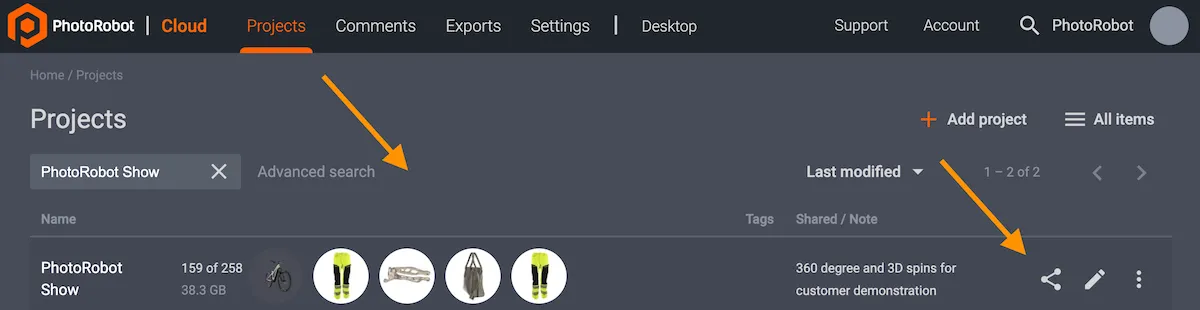
6. クラウド版のCAPPで プロジェクト を開き、保存したクライアントと共有するプロジェクトを見つけて、プロジェクトバーにマウスを置き、プロジェクトの詳細の右側にある共有アイコンをクリックします。
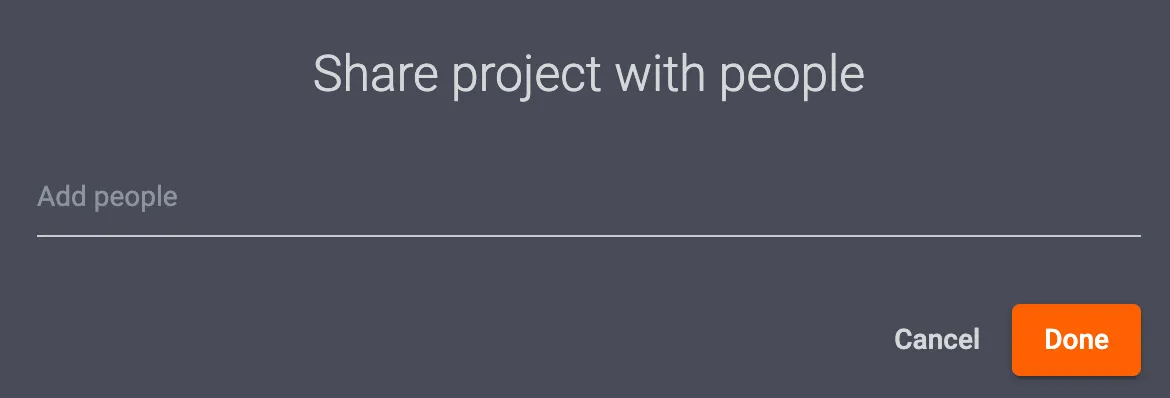
7. プロジェクトバーの右側にある共有アイコンをクリックして、 プロジェクトをユーザーと共有 機能を開き、保存したクライアントを選択して、[完了]をクリックします。プロジェクトはクライアントと共有され、クライアントは品質保証と必要に応じて追加の指示のために CAPP でジョブを表示およびコメントできるようになります。
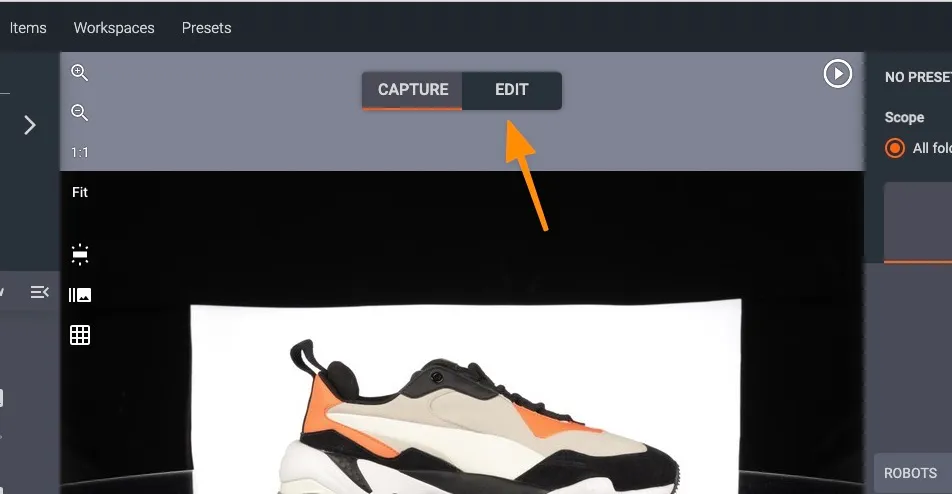
キャプチャ モード インターフェイス
アイテムをクリックすると、キャプチャ/編集インターフェイスにアクセスできます。使用できるコントロールは 、キャプチャ モードがアクティブか 編集 モードかに基づいて変更されます。キャプチャモードは撮影シーケンスを制御するために使用され、編集モードはCAPP内で実行されるすべての後処理を制御します。アクティブモードは画面の上部でハイライトされます:
スピン、静止画、ビデオフォルダの追加
写真撮影を行う前に、少なくとも 1 つのフォルダを作成する必要があります。主な種類のフォルダは スピン (360°プレゼンテーションに使用)、 静止画 (静止画用)、ビデオ(ビデオ用)です。
スピンフォルダの作成
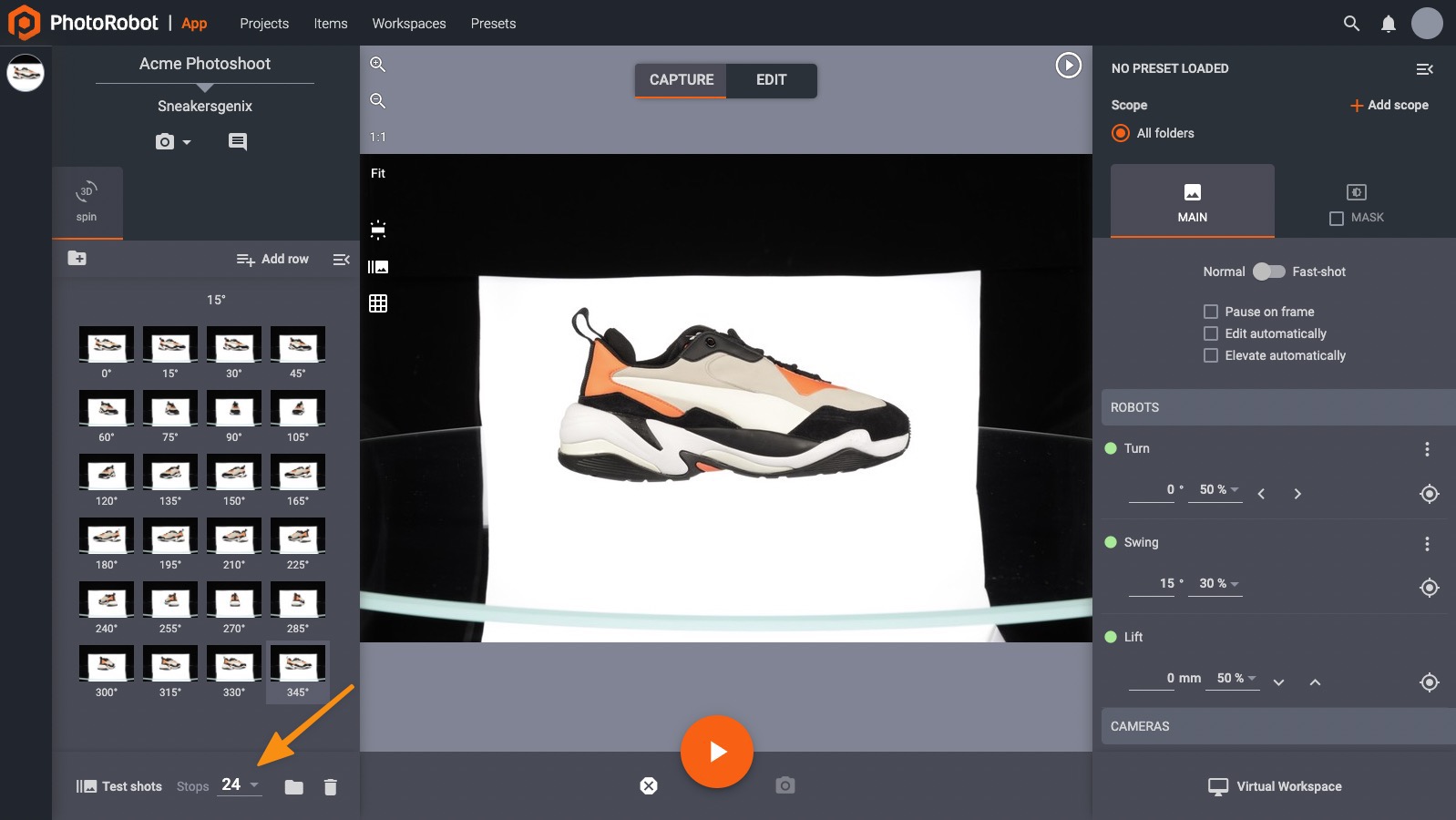
スピンフォルダを追加すると、CAPPは選択したスピンあたりの画像数に基づいてストップ(「フレーム」とも呼ばれます)を自動的に追加します。デフォルトの数は 36 で、これは左下隅で変更できます。ストップの数が多いほど、回転はよりスムーズになりますが、より多くのストレージスペースを占有します。
静止画フォルダの作成
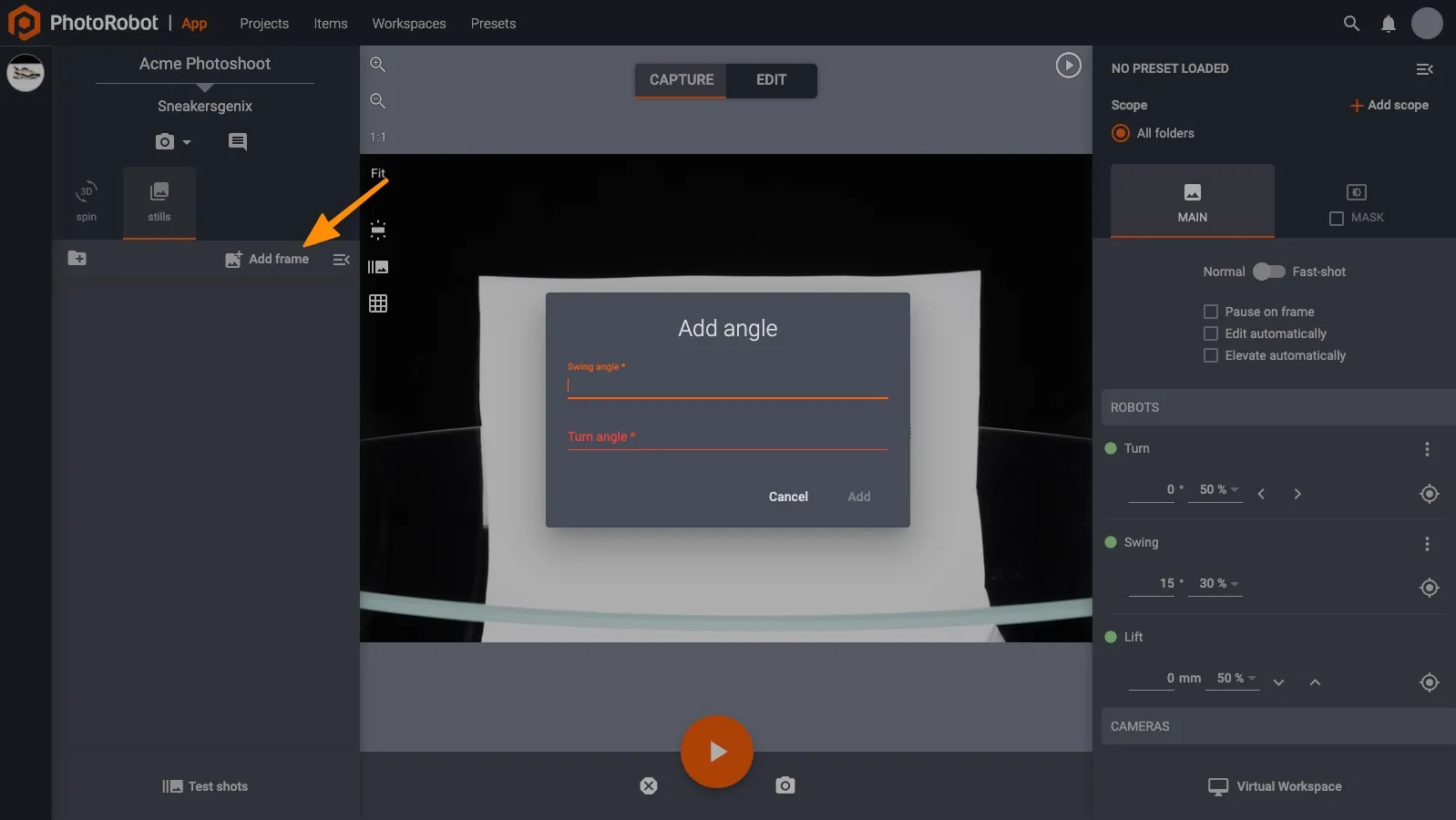
静止フォルダを選択した場合は、ストップを手動で追加する必要があります。これには、 回転角度 (回転角度)と スイング角度 (円形の軌道に沿ったカメラの垂直位置)が含まれます。カメラの水平位置を変更できるロボットアームや他のモジュールを使用している場合、スイング角度は重要です。
画像のインポート
場合によっては、CAPPの新規または既存のフォルダに画像をインポートしたいことがあります。たとえば、ハンドヘルド写真、詳細なショット、またはその他の雑多な画像のインポートを考えてみましょう。
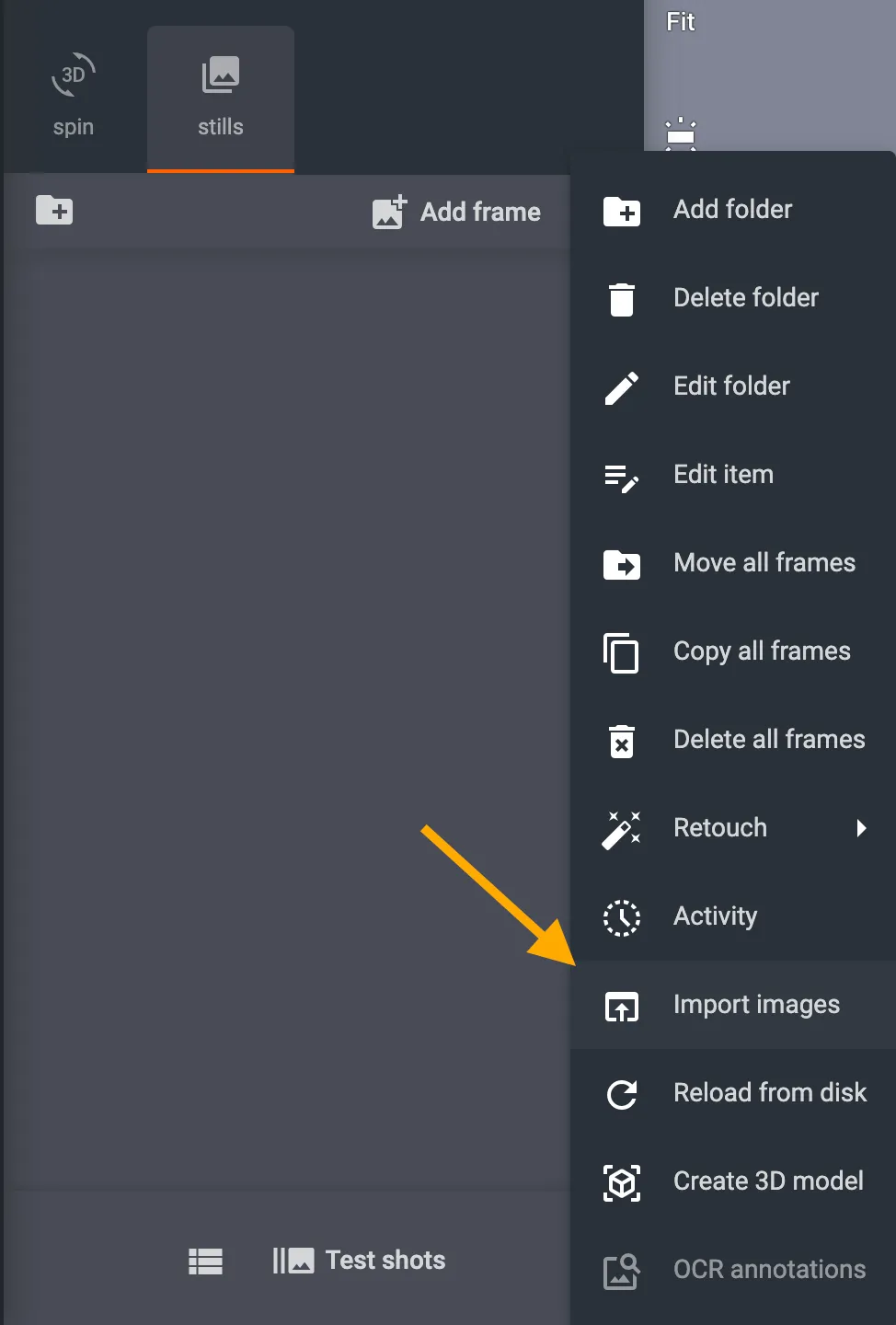
画像を CAPP にインポートするには、まず CAPP のキャプチャ モード インターフェイスで新規または既存のアイテムを開きます。次に、フォルダインターフェイスの右上隅にあるフォルダ操作メニューのアイコンをクリックします。
次に、フォルダ操作メニューオプションで、リストから 画像のインポート を見つけてクリックします。
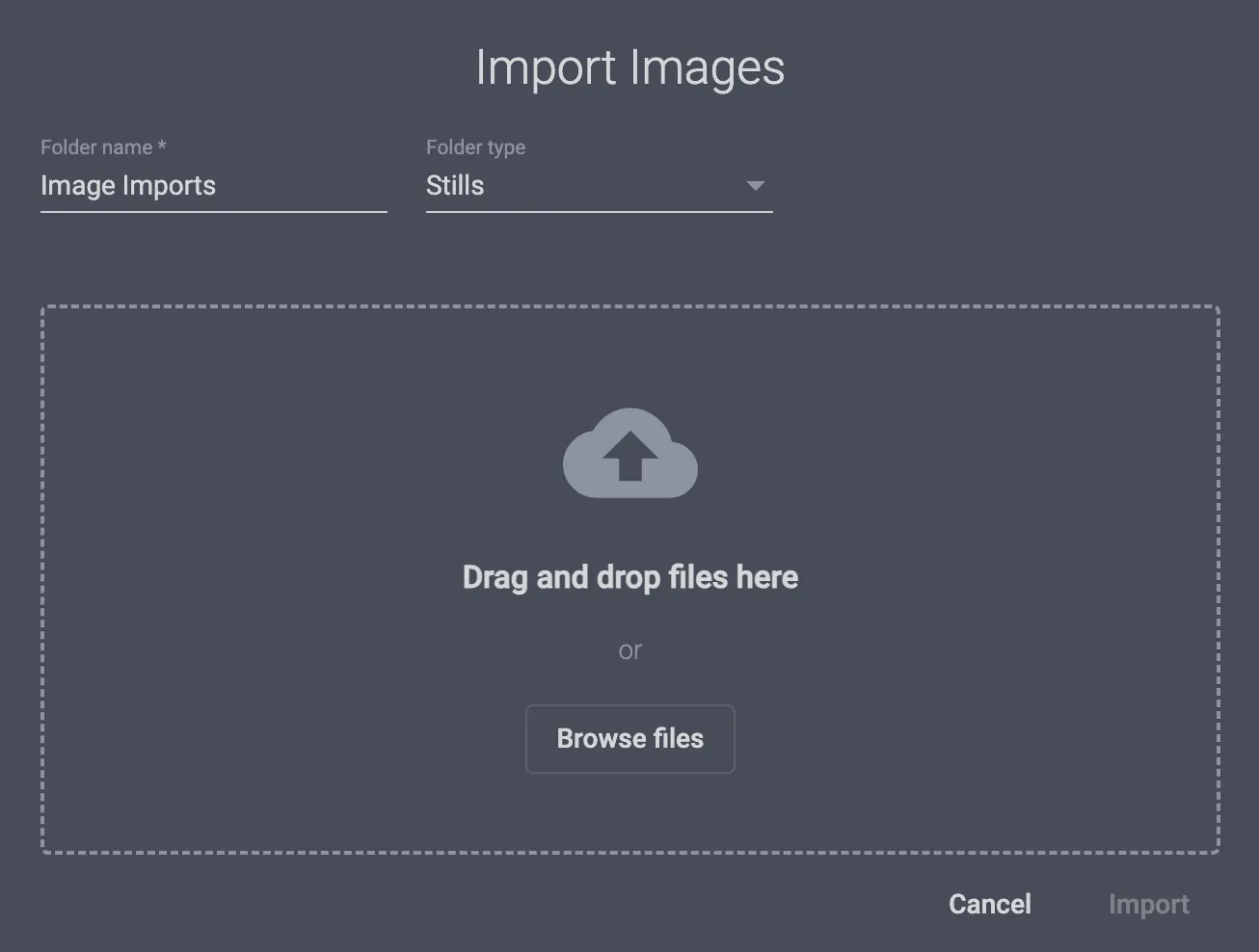
[画像のインポート]をクリックすると、ポップアップウィンドウが開き、ドラッグアンドドロップまたはローカルファイルの参照による画像のインポートが可能になります。ウィンドウの上部で、インポートした画像のフォルダ名とフォルダタイプを設定することもできます。
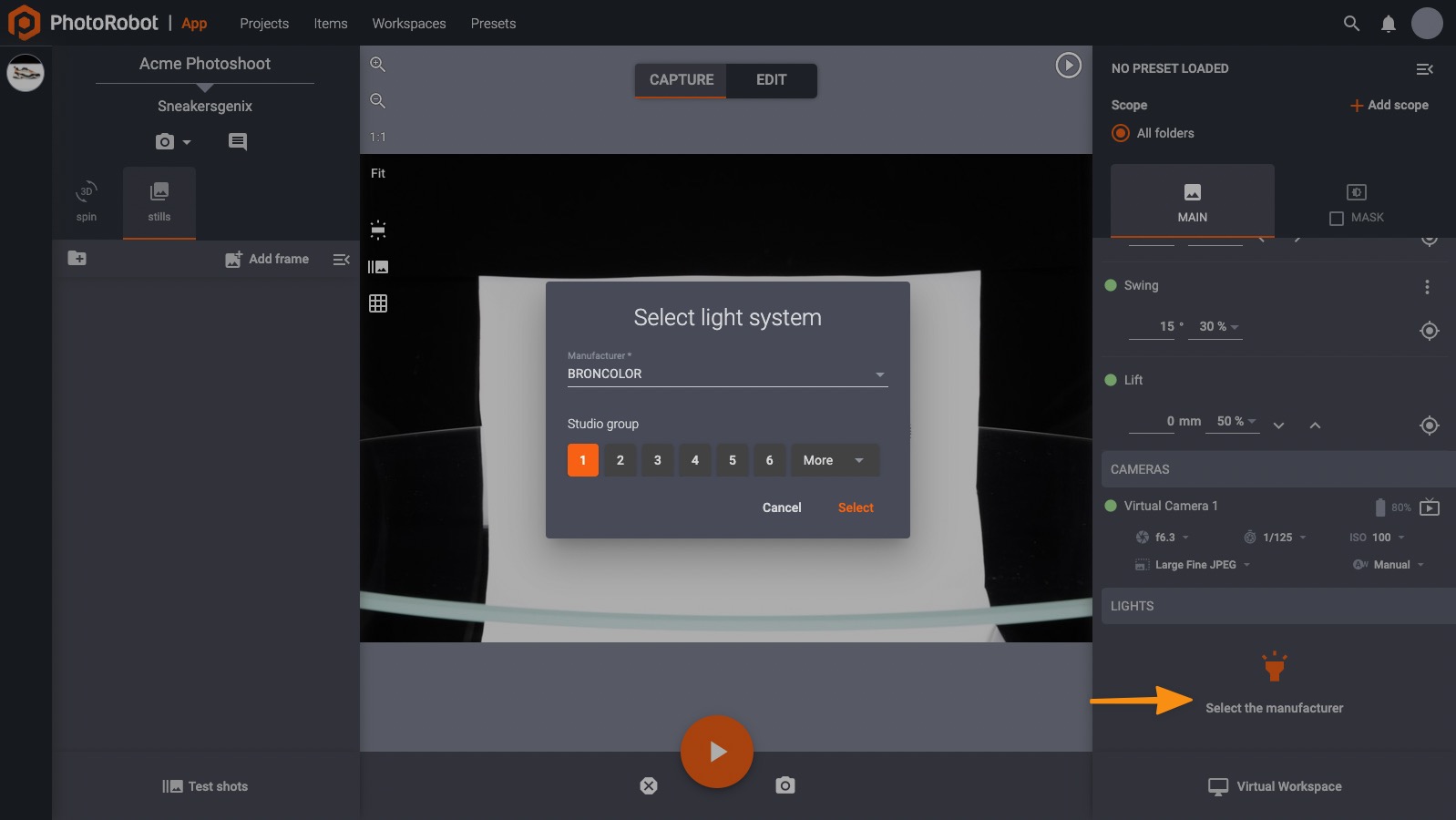
コントロール対応ライト
CAPPと互換性のあるライトを使用する場合、編集モードウィンドウの右下隅にあるライトを選択できます。
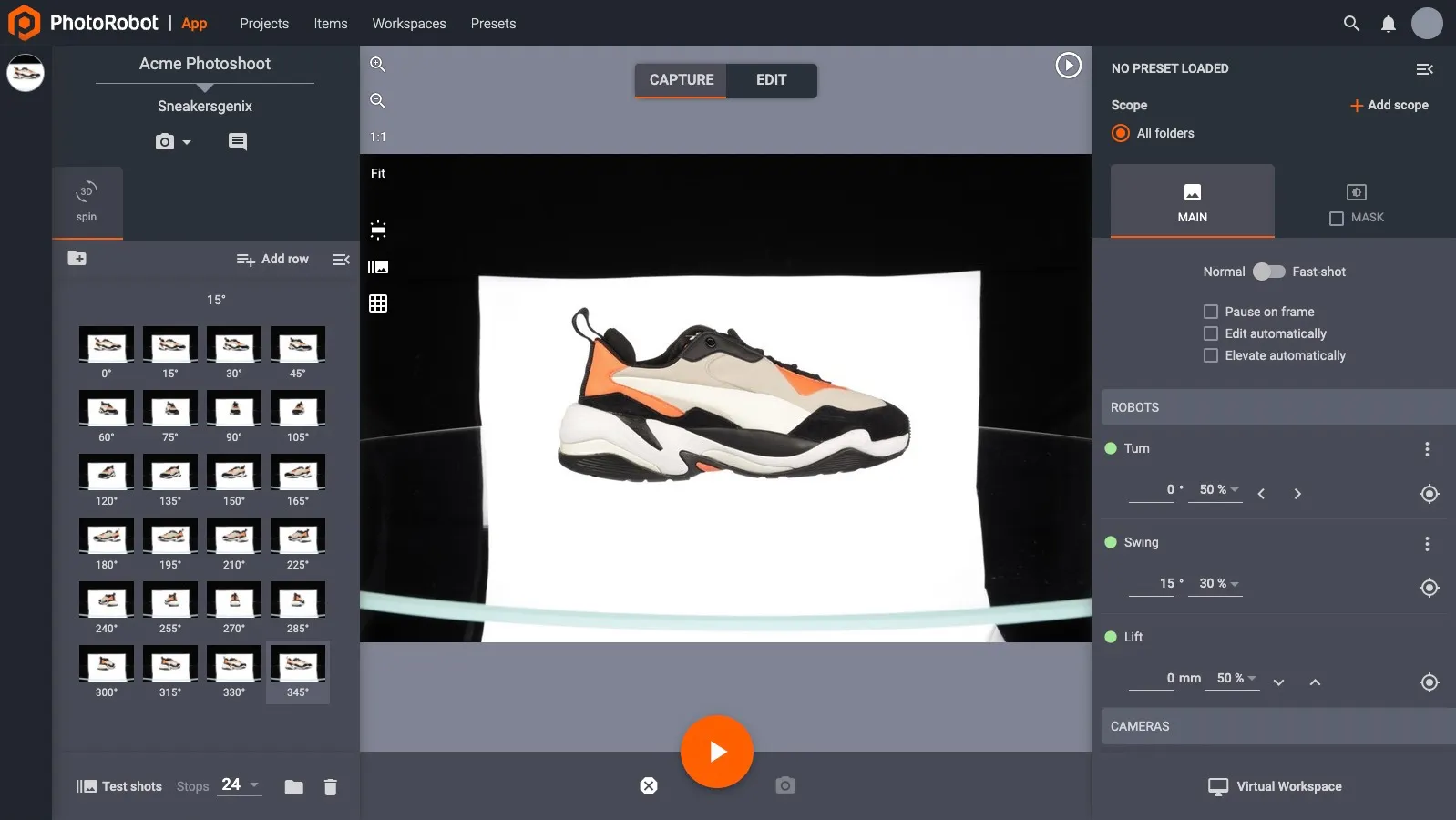
キャプチャ モード インターフェイスの概要
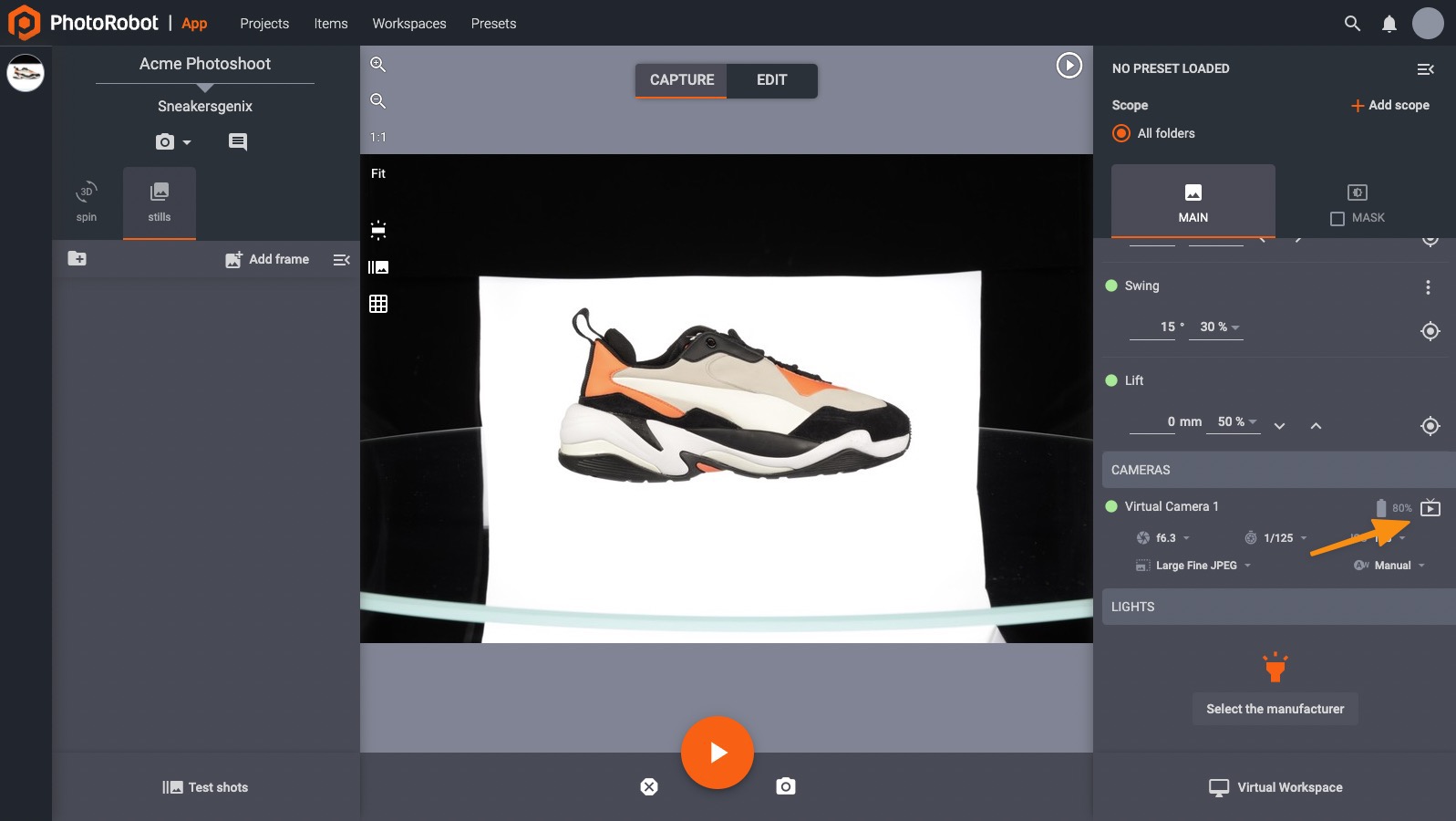
キャプチャモードインタフェースの中央には、プレビューウィンドウが含まれており、現在選択されている画像(すでに撮影済みの場合)またはカメラからストリーミングされたライブビューが表示されます。
落ち着きとフォーカスを確認したい場合に便利なLive Viewは、画面右側のコントロールバーの中央部にあるカメラコントロールエリアで切り替えることができます。
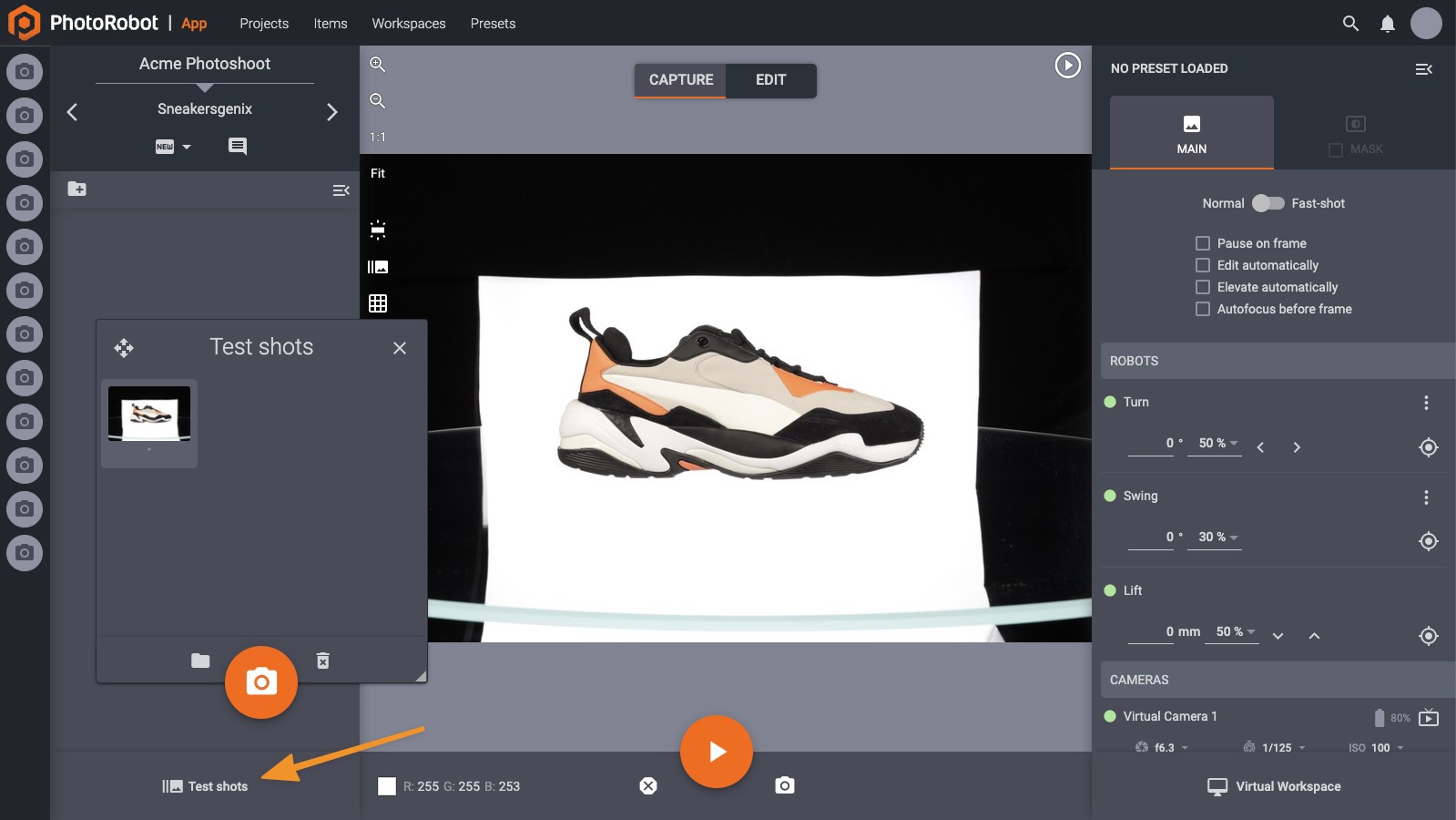
テスト ショットを撮影する
最終的な画像を撮る前に、1つ以上のテストショットを撮ることをお勧めします。これを行う最も簡単な方法は、コンピュータのキーボードの T キーを押す方法です。これは、あなたのライト、カメラなどの設定を変更する必要があるかどうかを確認するのに役立ちます。テストイメージは「テストショット」フォルダに保存され、画面左下の部分にアクセスできます。
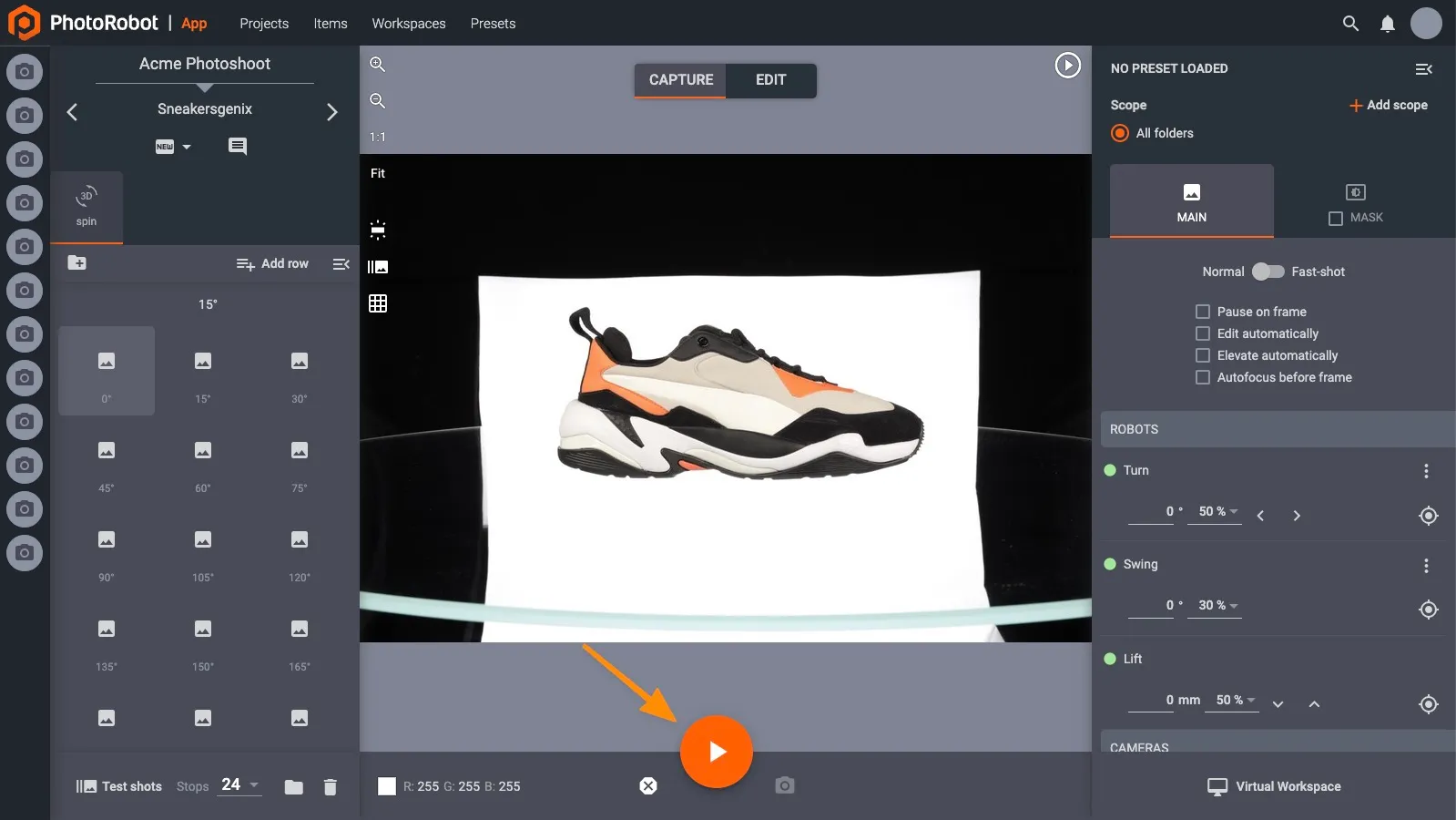
写真シーケンスの開始
テストショットを撮って検証した設定に満足したら、撮影シーケンスを実行する時間です。これは、キーボードのスペースバーを押すか、下の写真に示す「スタート」ボタンをクリックすることによってトリガーすることができます。
バーコードスキャナーをお持ちの場合は、特別な「開始」バーコードをスキャンしてシーケンスをトリガーすることもできます。PhotoRobotの「スタート」バーコードをオンラインでダウンロードし、印刷してこの機能を使用します。

左側のすべてのサムネイルが画像で塗りつぶされていれば、シーケンスが正常に終了したことがわかります。ストロボライトの潜在的な失火に注意を払うことは良い習慣です。
サムネイルのどれかが他のサムネイルと比較して暗い場合は、回転速度を下げるか、必要に応じてライトの状態を確認します。これらのイメージをマークし、シーケンス全体を再度実行しなくても再撮影できます。
キャプチャ シーケンスが完了したら、後処理を実行する編集モードに切り替えることができます。
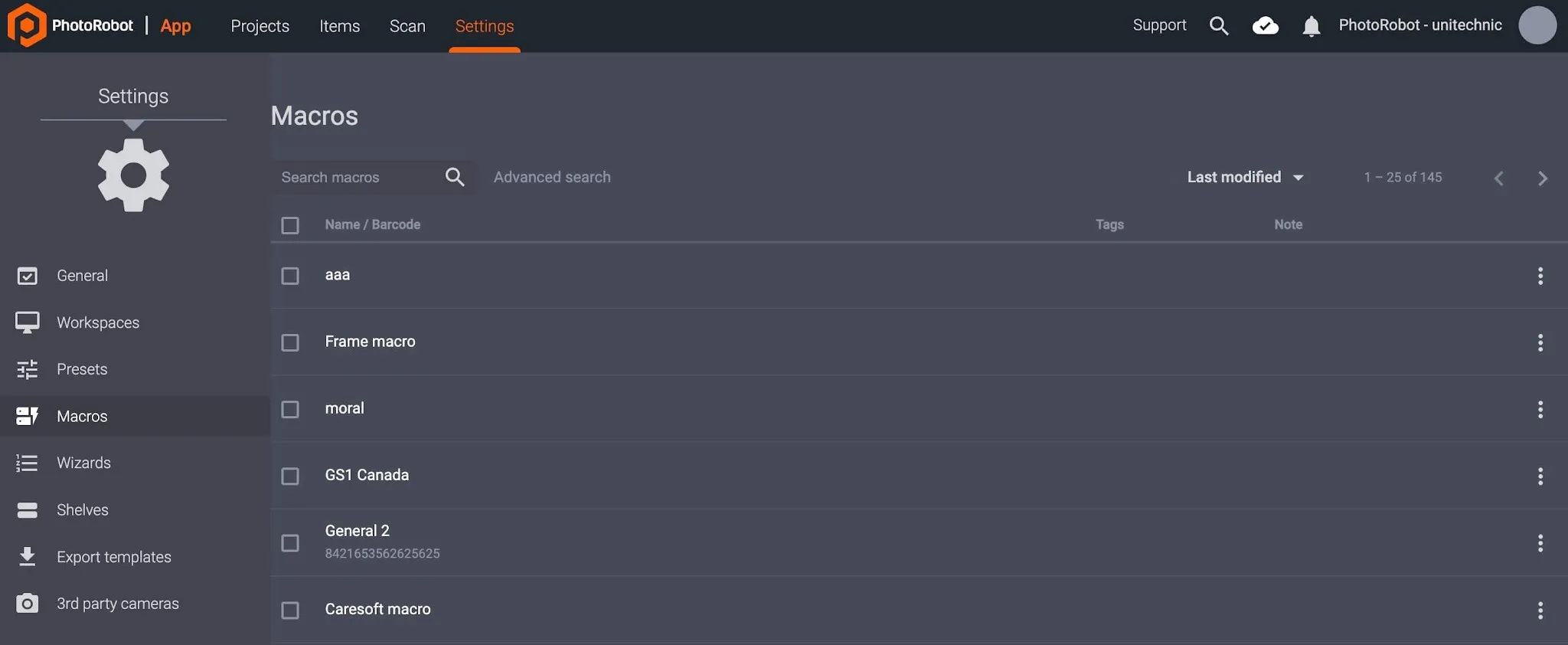
PhotoRobotマクロ
CAPP のマクロを使用すると、アイテムとそのフォルダー (スピン、静止画など) のキャプチャ プロセスのコマンドを定義できます。コマンドは、個々のフォルダーまたは複数のフォルダーに適用したり、シーケンスを実行したり、画像を編集したり、ワークスペース、プリセットを実行したり、画像設定のコピーや画像設定の移動を行ったりすることができます。ユーザーは、名前、バーコード、タグ、またはメモでマクロをさらにカスタマイズすることもできます。
注: PhotoRobotマクロの設定と使用に関する詳細な手順については、PhotoRobotマクロユーザーガイドを参照してください。マクロが複数のフォルダーとコンポーネントで写真撮影の自動化の魔法をどのように実現し、複雑なタスクを自動処理するかをご覧ください。
PhotoRobot ウィザードモード
CAPPのWizardsモードは、手動でのハードウェア、カメラ、シーケンス設定の代替として機能します。Wizardsモードを使用すると、管理者または写真家が異なるWizardsを作成して、生産ラインオペレーターのキャプチャモードを簡素化できます。オペレーターはWizardsモードでCAPPを起動でき、これはウィザードガイド付きの手順を備えた非常にシンプルなインターフェースとして機能します。使いやすさとオンボーディングのための制限されたコントロールもあります。
ウィザードを作成すると、プリセットとワークスペースの設定、およびオペレーターが従うべき事前定義された手順が保存されます。オペレーターは設定を調整できず、次のプロセスに進む前に各ステップの指示を完了する必要があります。
注: ウィザードのステップはJavaScriptのような言語形式で定義されており、PhotoRobotのコンサルタントによってカスタム機能のためにスクリプト化されています。ユーザーは、初期の実験や簡単なセットアップのために基本的な機能をスクリプト化することもできます。ウィザードの技術的な構成とオペレーターの使用に関するドキュメントについては、PhotoRobot ウィザードモードユーザーマニュアルを参照してください。
編集モードインタフェース
画面の右側には、任意の数の編集操作を追加できます。
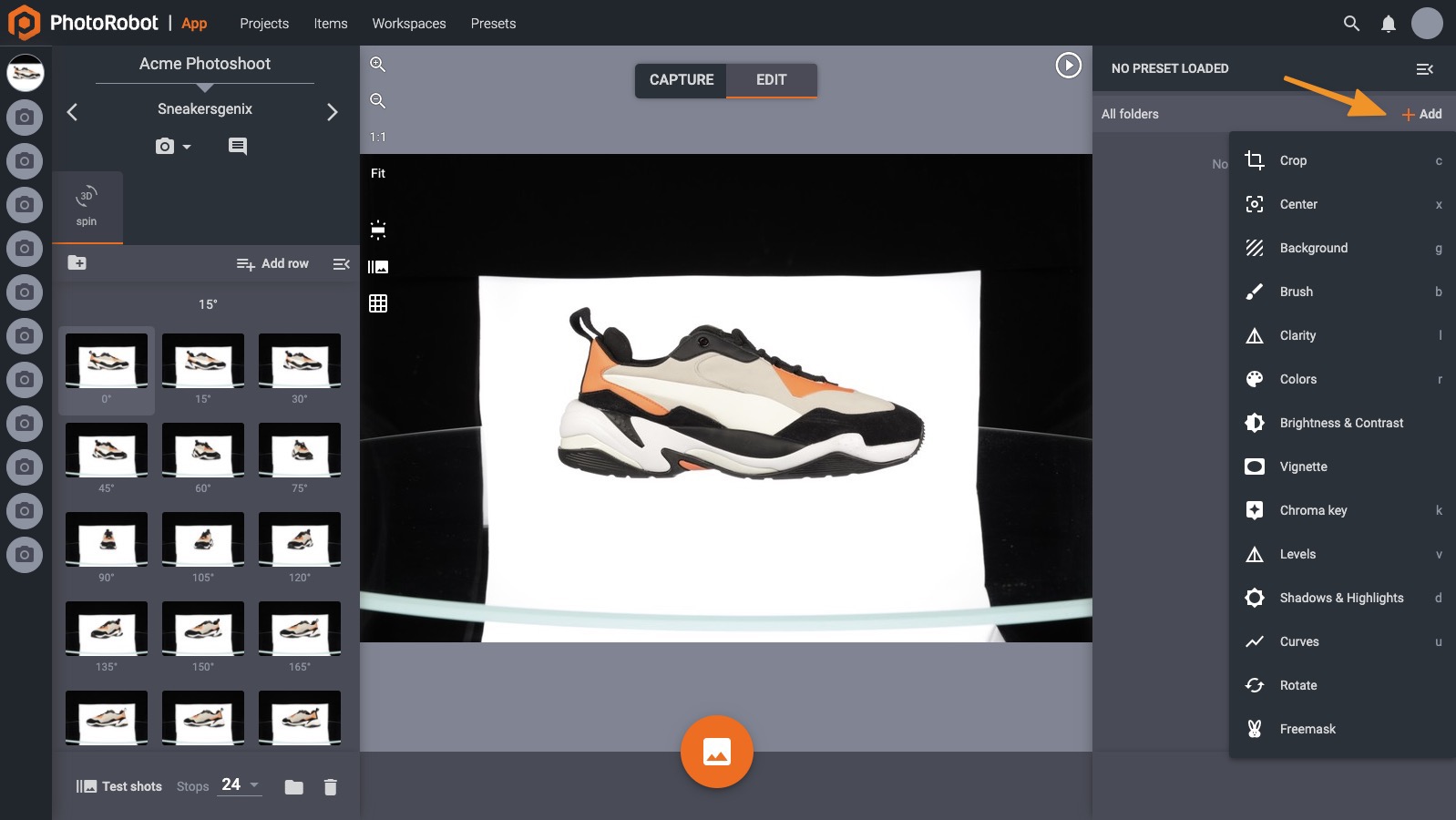
最も一般的な編集操作の一部は、上部に表示されます: トリミング、中央、背景。
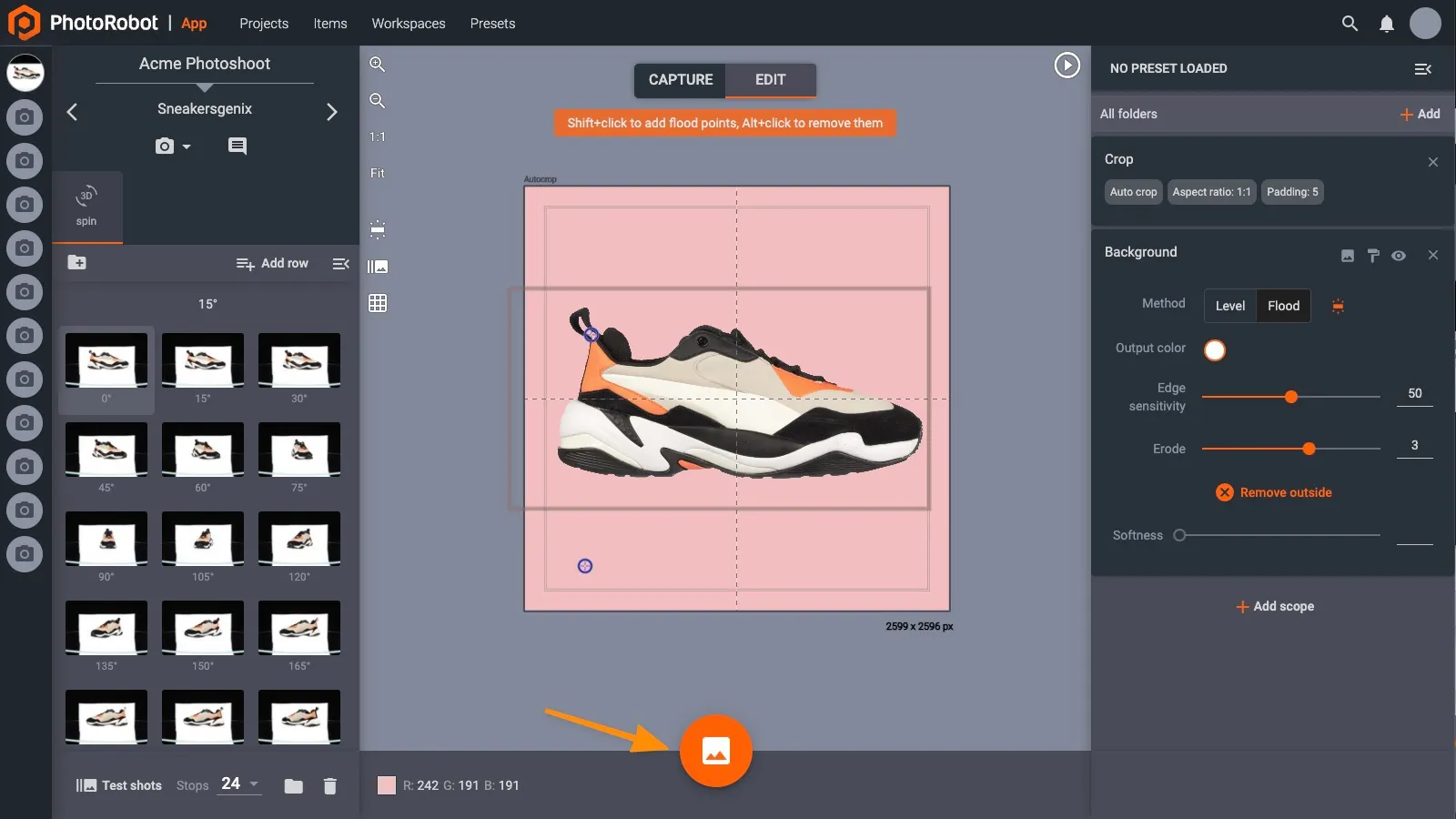
自動トリミング
トリミング - 画像をトリミングする場合、3つの主要なコントロールがあります:自動トリミング、縦横比、パディング(撮影したオブジェクトの周囲にスペースがある量を制御する)の切り替え。

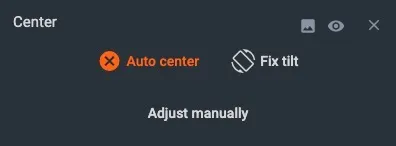
オートセンター
Center - ほとんどのPhotoRobotマシンには、表面上のオブジェクトの配置に役立つレーザーが装備されていますが、ほとんどの画像は追加のソフトウェアセンタリングが必要です。これは360°スピンにとって特に重要です。開始する場合は、以下の図に示すように、「自動センター」機能をオンにしておくことをお勧めします。
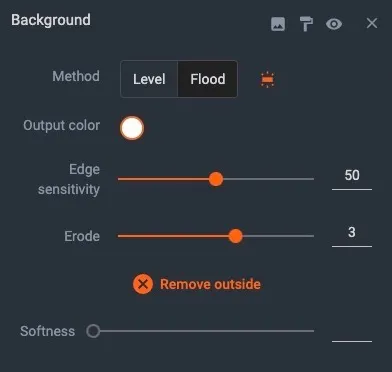
バックグラウンド削除
背景操作では、画像または画像セットの背景が調整され、必要に応じて背景が完全に削除されます。CAPPの3つの異なる背景除去方法によって、異なる結果を得ることができます。レベル別の背景除去、洪水による背景除去、およびフリーマスキングによる背景除去があります。
- レベル別の背景の削除 では、RGBカラーレベルと明るさの値をソフトウェアで分析して、背景と前景を特定します。これは、明るいアイテムや白いアイテムを撮影する場合や、白い背景を使用する場合に便利です。ソフトウェアでレベルを調整して、背景の明るさが真っ白になるまで強度を上げます。その後、背景を透明にしたり、異なる色の背景に交換したりできます。
- フラッドによる背景除去 は、レベルごとの背景除去と同様の原理で機能し、暗いアイテムを撮影するときに最も頻繁に役立ちます。フラッド操作で背景を削除すると、アイテムの周りが真っ白になるまで背景の明るさが強くなります。ただし、レベルを調整する代わりに、ツールは選択したポイントを使用して背景を特定し、その領域を「フラッディング」します。ユーザーは、撮影されたオブジェクトの外側のポイントをクリックするだけです。次に、ソフトウェアはオブジェクトのエッジを検出し、フラッディングを適用して周囲の使用可能なスペースを埋めます。
- フリーマスキングの背景除去には 、レベルやフラッドを使用するよりも多くの設定が必要ですが、最も正確で迅速な方法の1つです。この方法では、切り抜きマスク画像と製品のメイン画像を使用し、2つの画像を合成して 背景を削除します。場合によっては、これがより「難しい」オブジェクトの周りの背景を削除する唯一の効率的な方法です。たとえば、反射するアイテムや、空きスペースのある領域を含むオブジェクトを考えてみましょう。フリーマスキングは、オブジェクトとすべての空きスペースを識別し、必要に応じてアイテムの周囲とその内部の背景を削除します。ただし、この方法では、背景除去用のメイン画像とマスク画像を作成するために、スタジオライトの追加構成が必要です。
手記: CAPPが背景を削除できるかどうかは、主にシーンの照明方法に依存することに注意してください。満足のいく設定が見つからない場合は、別の照明設定で画像を再撮影してください。
編集設定に満足したら、以前に「開始」ボタンが現れた場所にある「適用」ボタンをクリックして、パラメータを適用します。
イメージの公開
進行状況バーが終了すると、編集がイメージに正しく適用されます。クラウド サービスをPhotoRobotしない CAPP を使用している場合、作成されたイメージはローカル ドライブのフォルダー構造に格納されます。
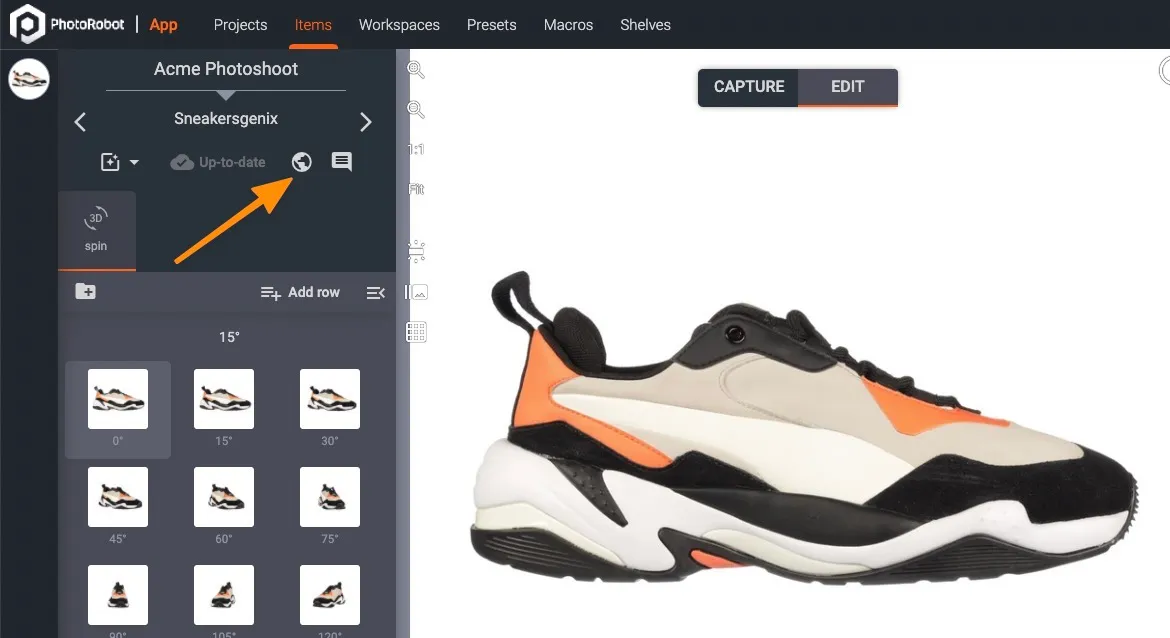
PhotoRobotクラウドホスティングを使用している場合、ファイルはPhotoRobotクラウドストレージにも含まれています。これらにアクセスするには、画面左上の[写真]セクションで[クラウドで開く]をクリックします。
イメージのエクスポート
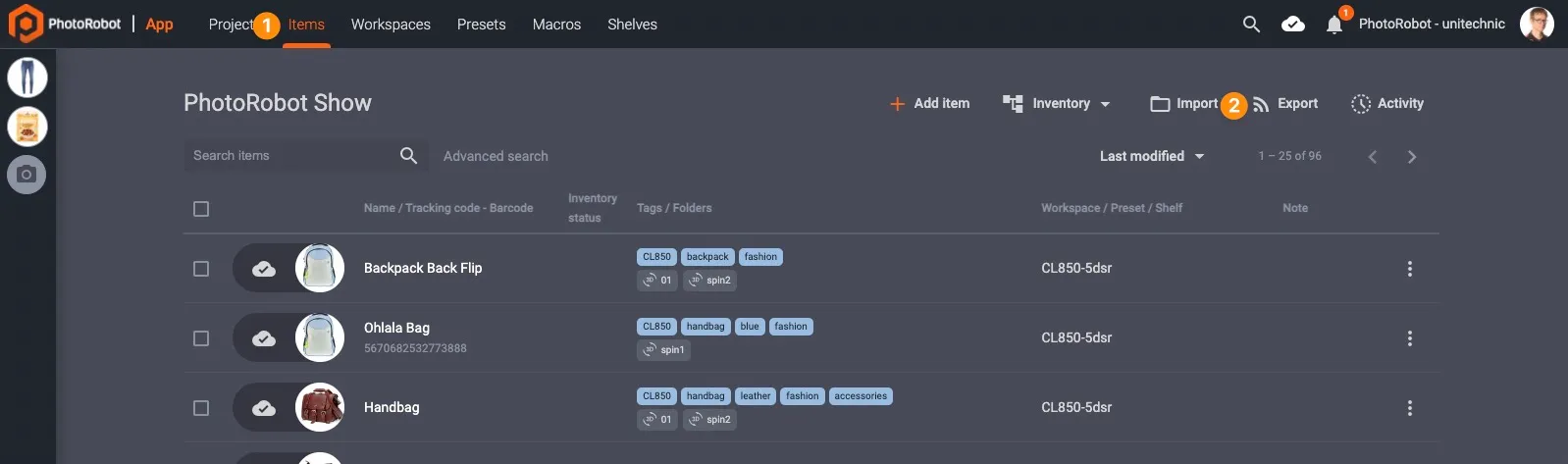
CAPP からアイテムをエクスポートするには、ローカル ディスクにエクスポートするか、PhotoRobot クラウドにエクスポートします。アイテムのエクスポートを使用すると、カスタム命名規則を使用してアイテムを定義し、画像形式、解像度、およびさまざまなファイル名テンプレート変数を指定できます。
アイテム のエクスポート設定にアクセスするには、[アイテム]セクションに移動し、 アイテム リストの上にあるメニューで[エクスポート ]をクリックします 。
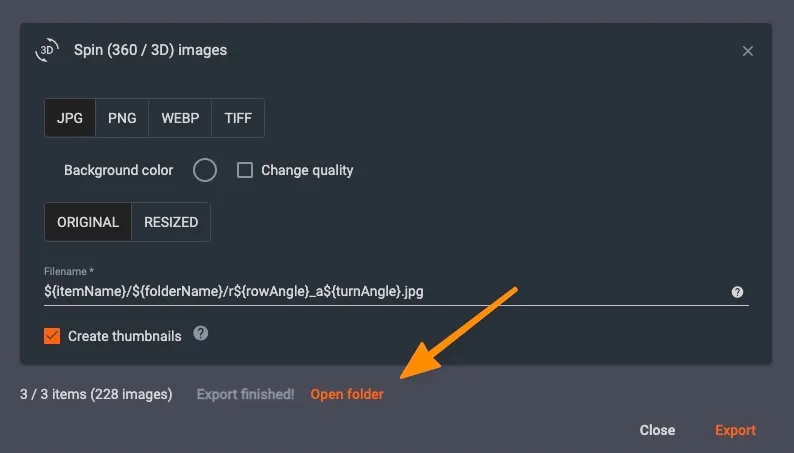
次のウィンドウが開き、エクスポート設定を変更できます。
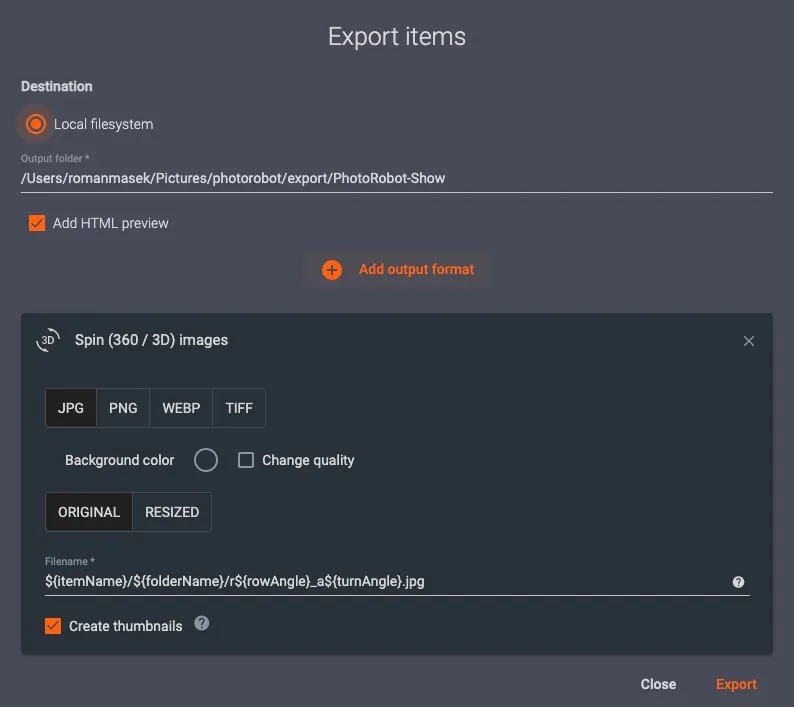
このウィンドウの右下隅にあるエクスポート ボタンをクリックして 、エクスポート 処理を実行します。
エクスポートの進行状況バーが終了したら、[ フォルダを開く ] をクリックして、エクスポートしたイメージにアクセスできます。
クラウド経由で公開
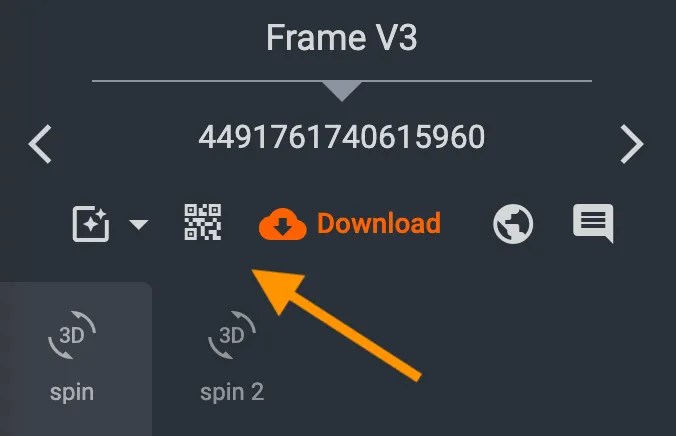
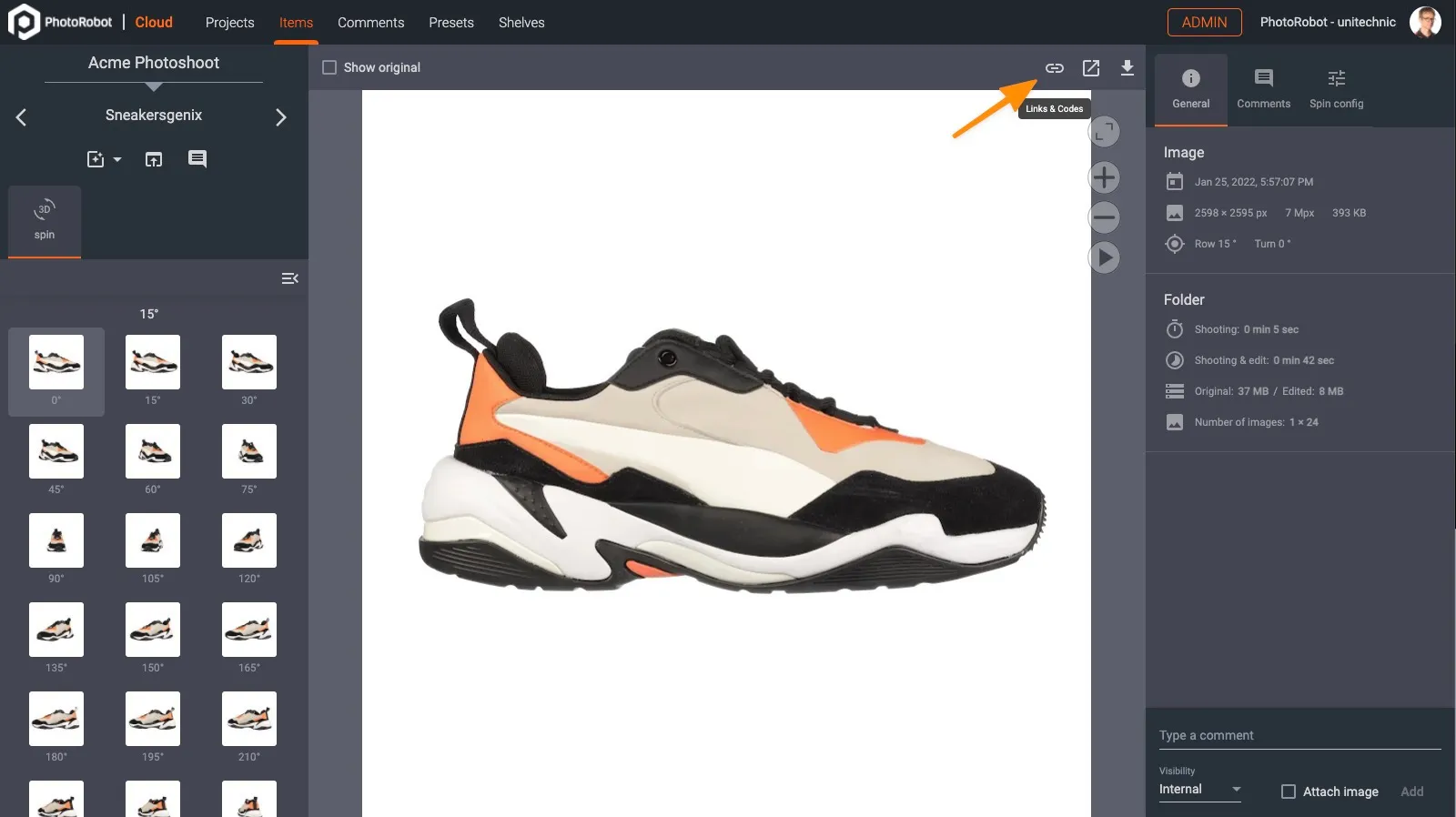
PhotoRobotクラウド サービスを介して発行する場合は、まず、クラウドでアイテムを開きます。インターフェイスには、キャプチャされたイメージが表示されます。[コードとリンク] ボタンをクリックします。
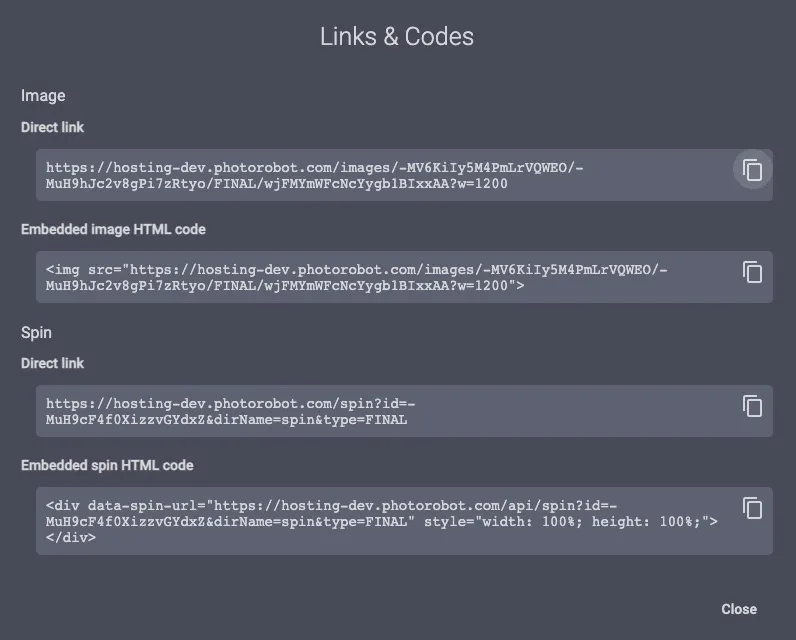
ダイレクトリンクをコピーしてブラウザに貼り付けて画像を表示するか、スピンします。 このコードをページに貼り付けて、表示用のスピンを埋め込みます。


EOS Rebel シリーズ


EOS DSLR シリーズ


EOS M ミラーレス シリーズ


PowerShotシリーズ


クローズアップ/ ハンドヘルド

Canon EOS Rebel シリーズは、安定した画質、直感的なコントロール、多彩な機能を備えた、初心者向けのデジタル一眼レフカメラを提供します。写真愛好家に最適なこれらのカメラは、信頼性の高いオートフォーカス、バリアングルタッチスクリーン、フルHDまたは4Kビデオ録画を提供します。
接続
解像度(MP)
解決
Canon EOS DSLR シリーズは、高品質の画像、高速オートフォーカス、および汎用性を提供し、写真とビデオ制作の両方に最適です。
接続
解像度(MP)
解決
キヤノンEOS Mミラーレスシリーズは、コンパクトなデザインとデジタル一眼レフのようなパフォーマンスを兼ね備えています。交換レンズ、高速オートフォーカス、高品質イメージセンサーを備えたこれらのカメラは、画質を犠牲にすることなく携帯性を求める旅行者やコンテンツ制作者に最適です。
接続
解像度(MP)
解決
キヤノンのPowerShotシリーズは、カジュアルなシューターや愛好家のためのコンパクトでユーザーフレンドリーなカメラを提供します。シンプルなポイント&シュートから高度なズームカメラまで、さまざまなモデルを取り揃えており、利便性、安定した画質、手ぶれ補正や4Kビデオなどの機能を提供します。
接続
解像度(MP)
解決
キヤノンのクローズアップ&ハンドヘルドカメラは、詳細でクローズアップした写真やビデオ用に設計されています。コンパクトで使いやすく、精密なフォーカス、高解像度のイメージング、汎用性の高いマクロ機能を備えており、Vlog、製品写真、クリエイティブなクローズアップに最適です。


