PhotoRobotシステムによる画像のキャプチャ
PhotoRobot コントロール アプリ ("CAPP" とも呼ばれます) でワークスペースを作成すると、キャプチャ インターフェイスによって、PhotoRobotのハードウェアとカメラに対するユーザーの制御が可能になり、画像とビデオのキャプチャが自動化されます。
キャプチャインターフェイス
CAAP キャプチャ インターフェイスは、次の 4 つの主要な領域で構成されます。
- アイテム情報
- フォルダ、フレーム、画像
- ハードウェア構成
- シーケンス制御
新しいアイテムの作成
CAPPでは、プロジェクトは1つ以上の単一アイテムで構成できますが、アイテムは通常、特定の写真オブジェクトです。その後、アイテムに 1 つ以上のフォルダーを含めて、さまざまな種類の画像を分離できます。最も一般的な例は、1つのフォルダを360度スピン(「スピン」)に指定し、別のフォルダを静止画(「静止画」)に指定することです。
写真撮影を開始する前に、新しいプロジェクトを追加し(既存のプロジェクトを使用する場合を除く)、少なくとも1つのアイテムを用意する必要があります。
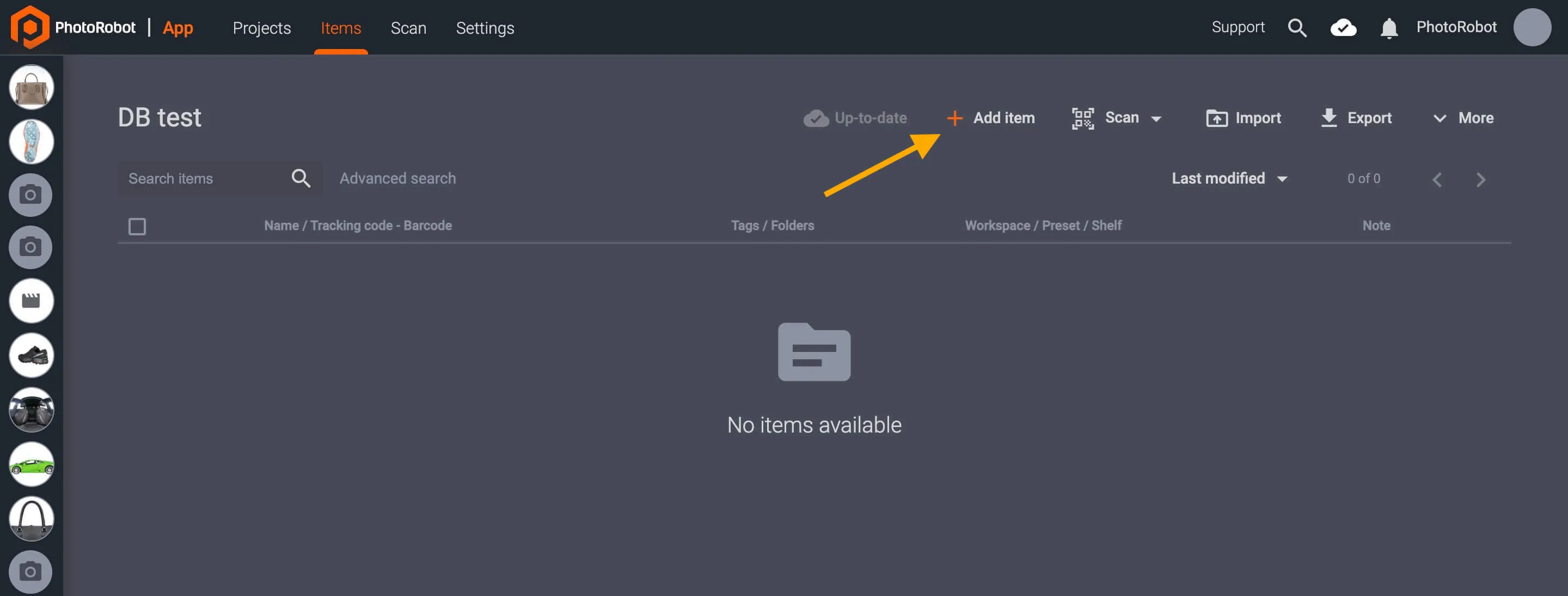
新しい項目を手動で作成するには、 プロジェクト に移動し、 項目の追加 を選択します。
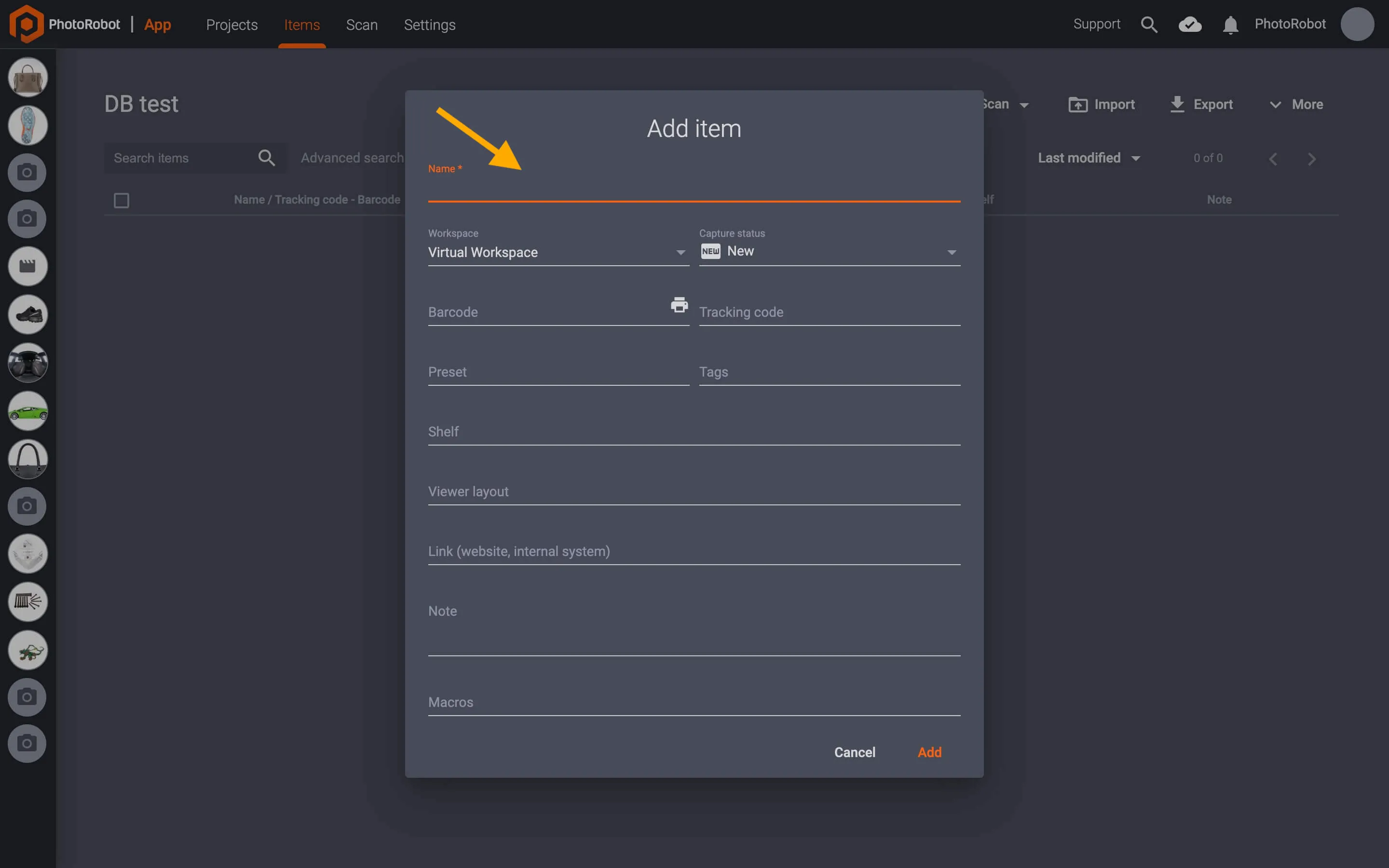
次に、表示されるウィンドウで、必須の [名前] フィールドに入力すると、[追加] ボタンが有効になって新しいアイテムが作成されます。ここでは、コード、リンク、メモ、マクロなど、より多くのアイテム情報を入力するオプションもありますが、これらのフィールドはオプションにすぎません。
手記: 新しい明細にバーコードがある場合は、新規明細を手動で登録するときに、明細バーコードをシステムに入力またはスキャンすることができます。
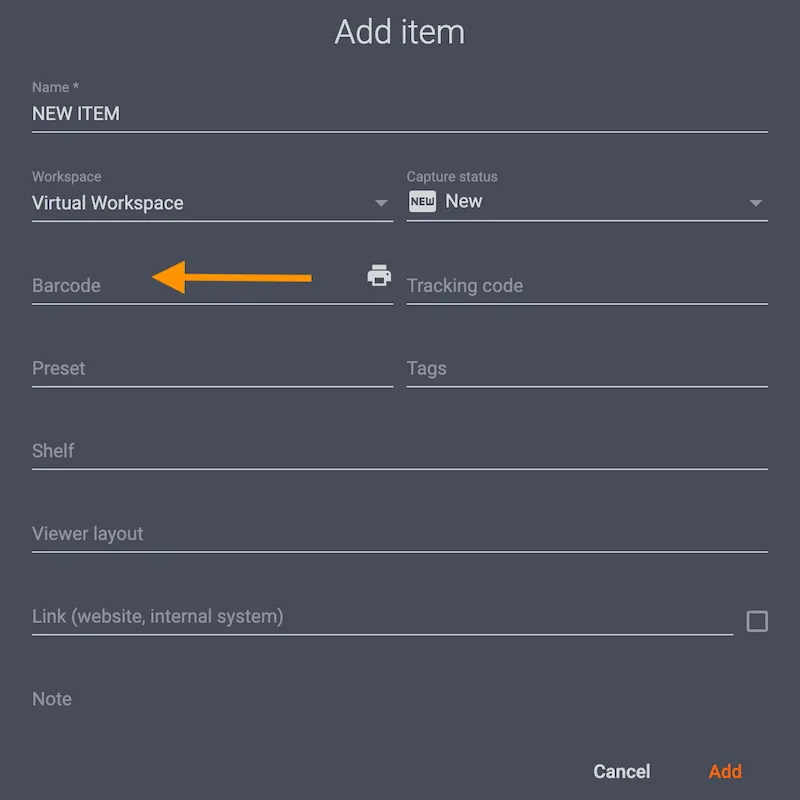
品目に品目バーコードを追加すると、[品目情報] 領域のバーコード ボタンをクリックして、キャプチャ モード インターフェイス内でバーコードを直接表示できるようになります。
CAPPに使用しているライセンスタイプを考慮することを忘れないでください。 クラウドベースのライセンスを使用している場合は、上記のフィールドの属性に加えて、より多くの属性があります。
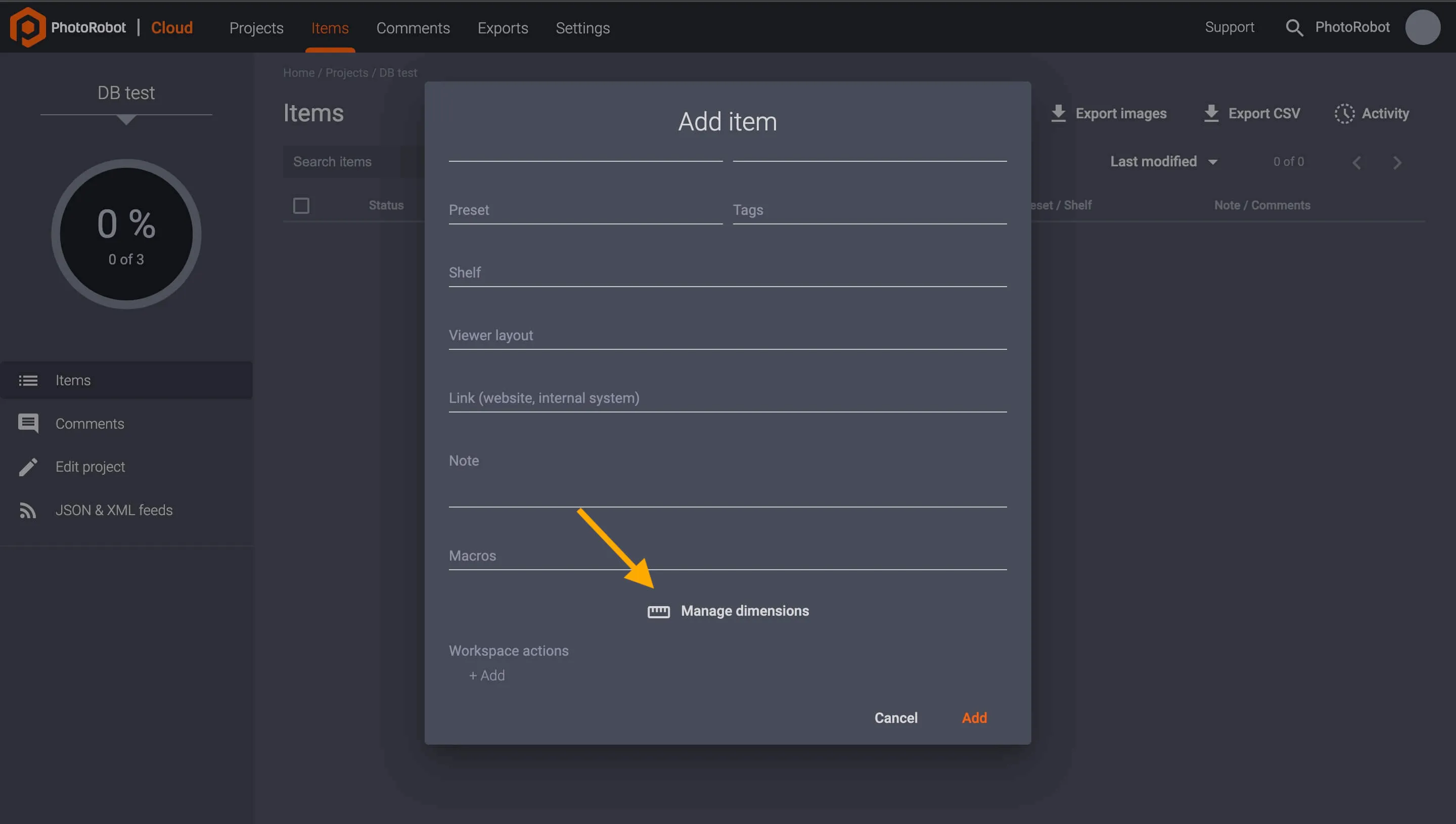
クラウドベースのライセンスでは、新しいアイテム オプションの一番下までスクロールし、[ディメンションの管理 ] を選択して アイテムの幅、高さ、長さ、重量を追加します。注:アクティブなクラウドベースのサブスクリプションにより、ユーザーは制限なく測定値を追加できます。属性を入力し、[ 確認 ] を選択してディメンションをアイテムに追加します。
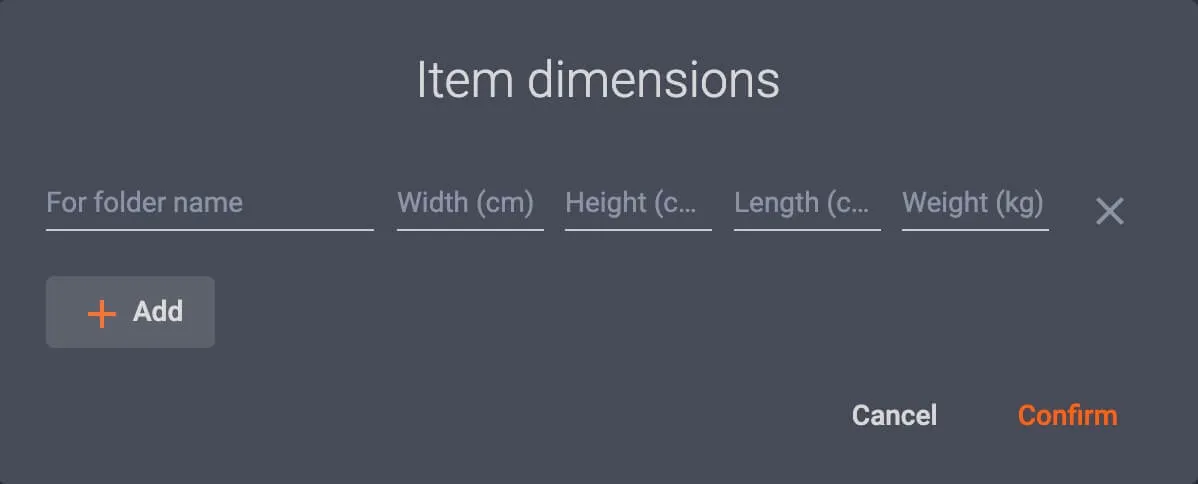
「追加」をクリックすると、すべてのユーザー設定属性を持つ新しいアイテムが作成されます。
新しいアイテムのインポート
さらに、 インポート 機能を使用して、複数のアイテムを 1 つのバッチで作成することもできます。アイテムインポート機能の前提条件は、CSV ファイルを介してインポートすることです。CSV ファイルには、ユーザーがインポートする各アイテムのすべての属性が含まれています。
CSV ファイルには、表形式のデータがプレーンテキストで格納され、個々のデータ レコードを区切る区切り文字が付きます。注:アイテムのインポート用のsample-import.csvファイルがあり、アプリケーションで直接ダウンロードできます。
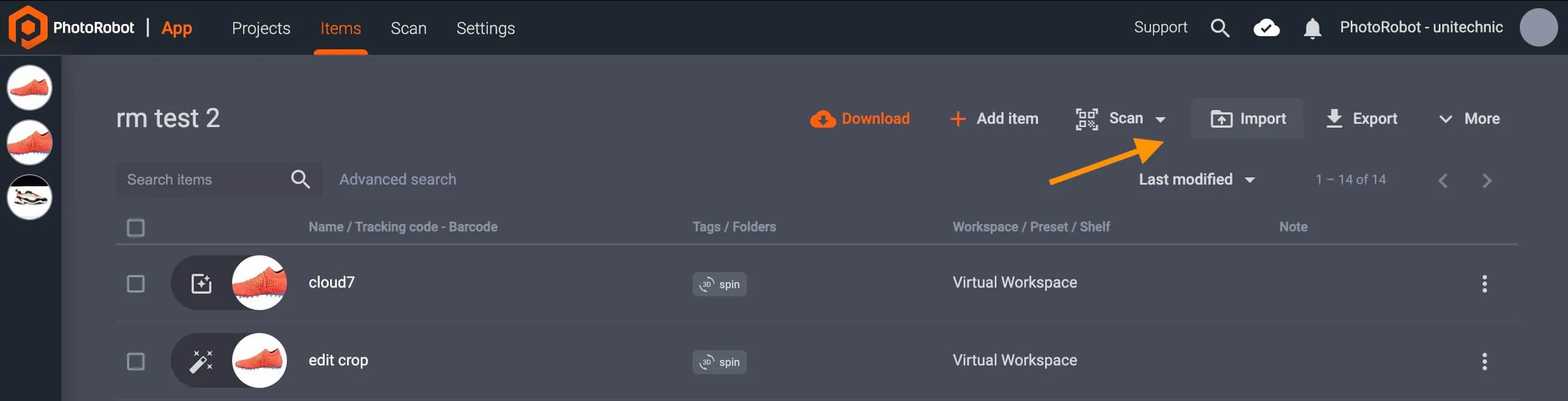
新しいアイテムをインポートするには、[ プロジェクト ] に移動して [インポート] を選択します。
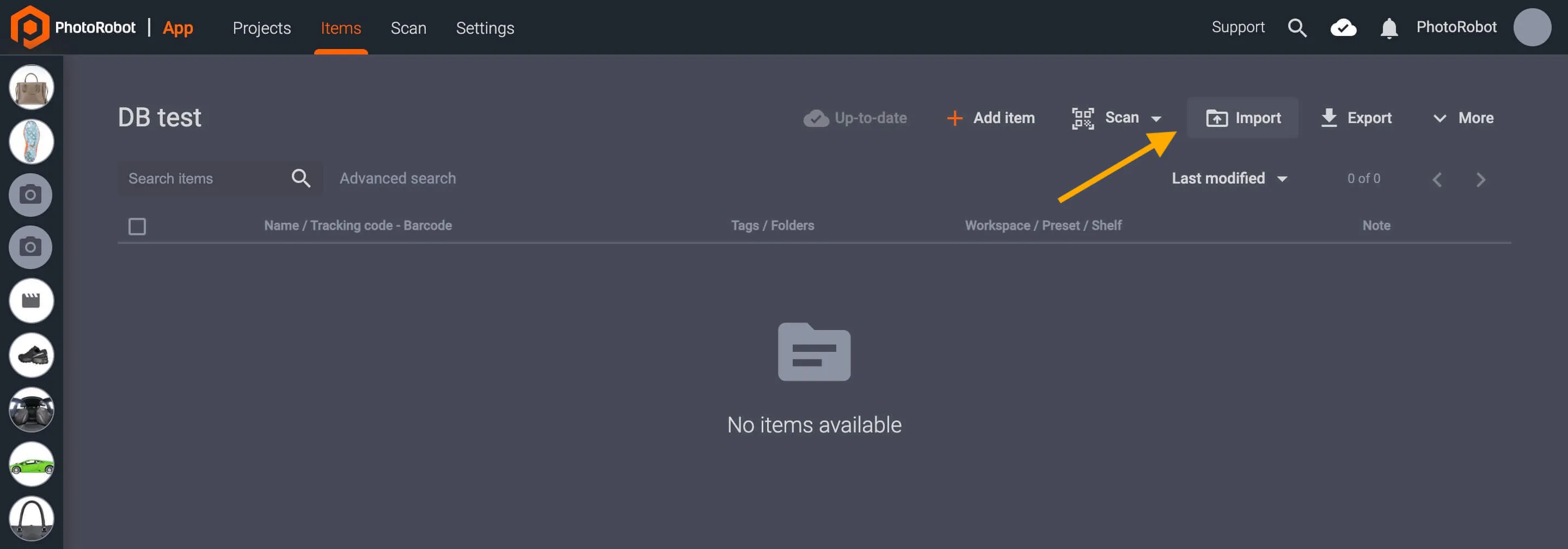
次に、ポップアップウィンドウで、CSVファイルをドラッグアンドドロップするか、[ファイルの参照]ボタンを使用してCAPPにインポートするローカルフォルダーを参照できます。
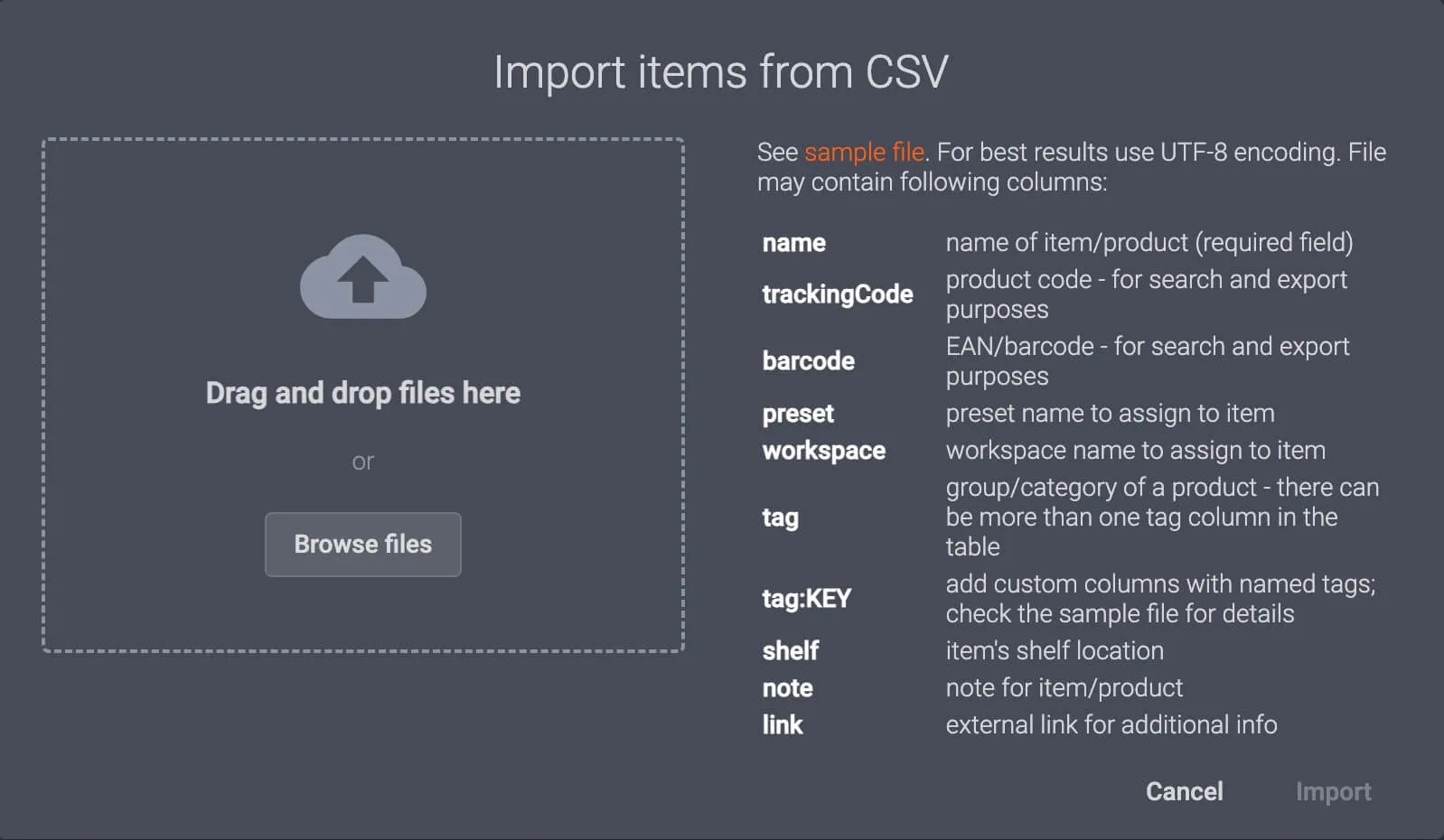
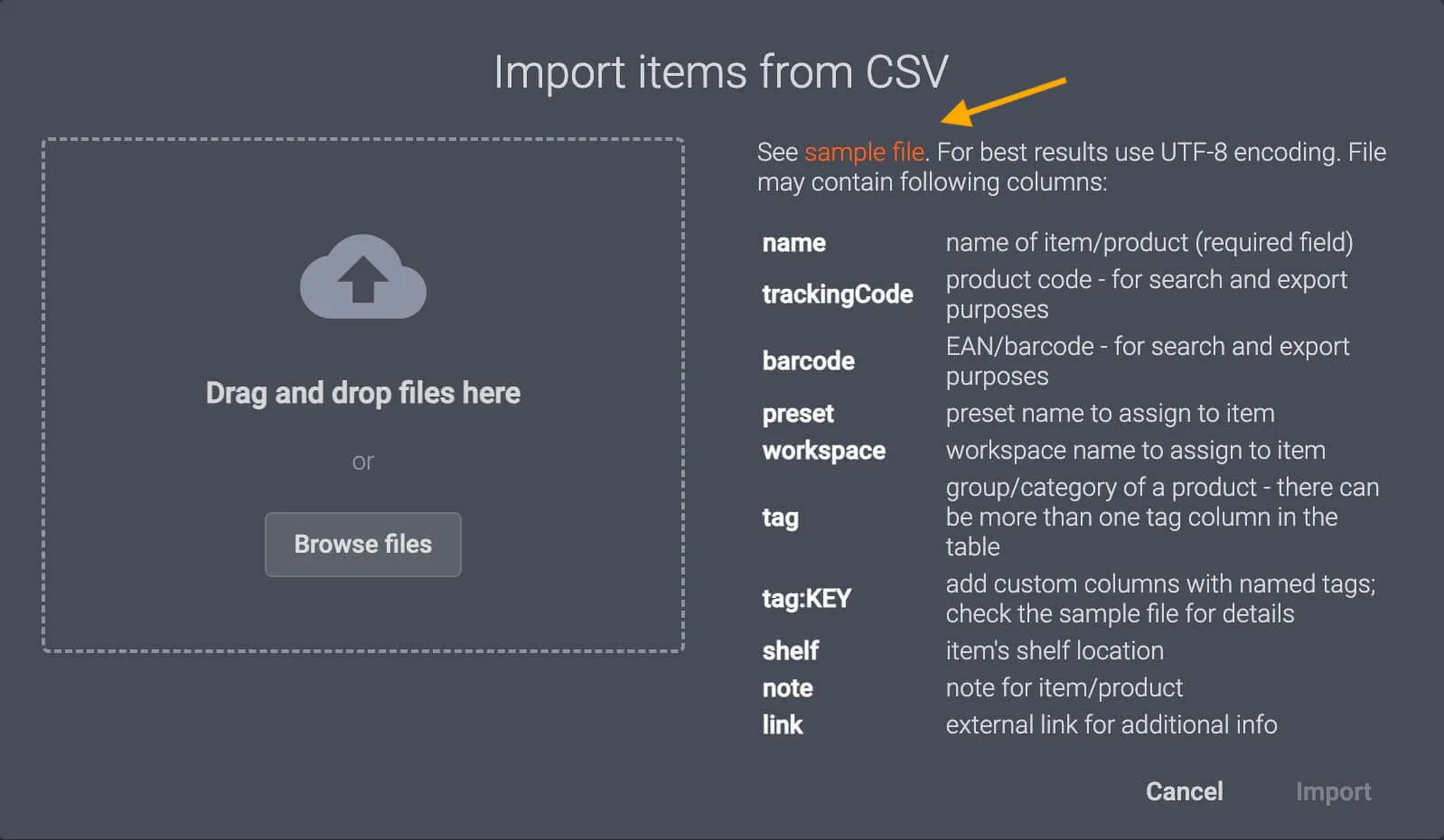
サンプル CSV ファイルを使用するには、インターフェースの右上にある [サンプル ファイル ] をクリックします。これにより、サンプル CSV がローカル コンピューターにダウンロードされます。
思い出す: アイテムのインポートには、アクティブなユーザーライセンスに制限なく、アイテムの寸法(長さ、幅、高さ、重量)を含めることができます。
新しいアイテムの自動作成
CAPPでアイテムを手動で作成する代わりに、バーコードスキャナーの詳細設定により、不明なバーコードをスキャンした後に新しいアイテムを自動的に作成できます。この設定は、キャプチャの時点でアイテムを識別するために機能します (通常はバーコードまたは QR コードを介して)。オペレーターが不明なコードをスキャンするだけで、プロジェクトに新しいアイテムが自動的に作成されます。アイテムの命名は、スキャンされた文字列に従って、アイテムの識別子フィールドで行われます。
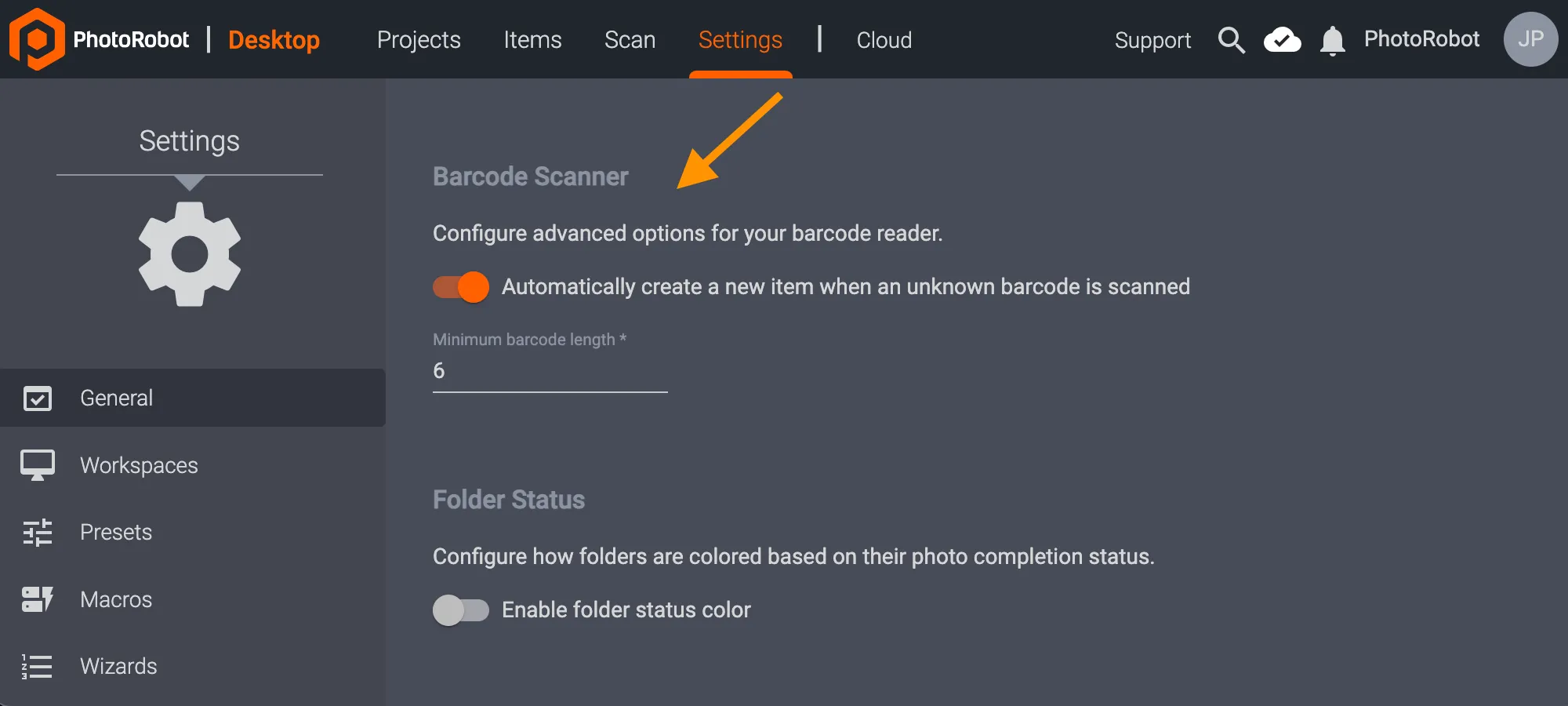
バーコードスキャナーによるアイテムの自動作成を有効または無効にするには、CAPPのローカルデスクトップバージョンの 一般設定 にアクセスします。次に、 バーコードスキャナー の設定を見つけ、トグルを使用して、 不明なバーコードがスキャンされたときにシステムに新しいアイテムを自動的に作成するのをオンまたはオフにします。
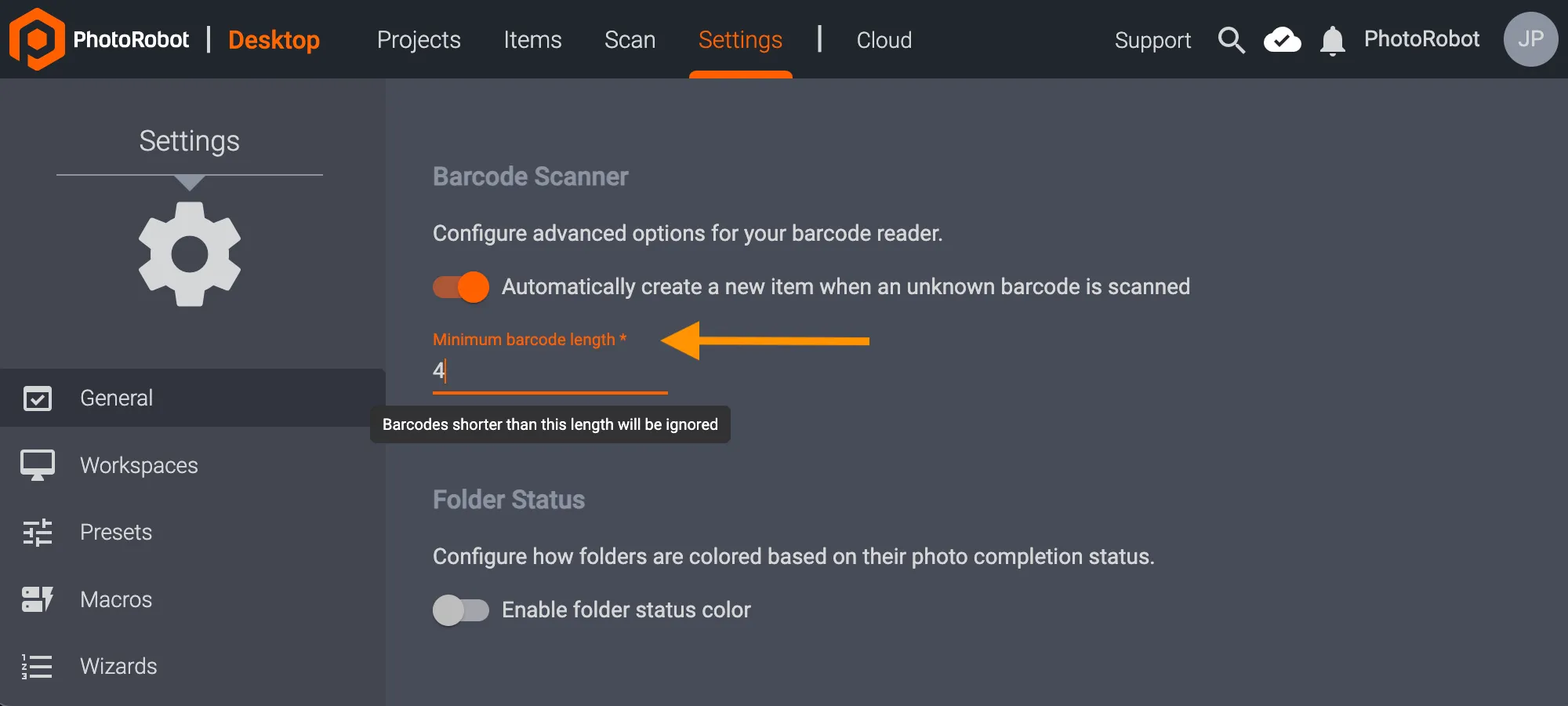
手記: CAPP バージョン 2.13.beta58 以降、バーコードの最小文字列長を設定するオプションが追加されました。以前は、バーコード/QRコードの最小長は6文字でした(スキャンされた文字列の二重解釈を避けるため)。現在、この数値は調整可能で、たとえば、4 文字の識別子をさらに調整することなく機能させることができます。
バーコード/QRコードの最小文字列長を調整するには、CAPPのローカルバージョンの一般設定 - バーコードスキャナーでも最小バーコード長を設定します。入力された長さよりも短いバーコードは、システムによって無視されます。
商品情報
CAPP キャプチャ インターフェイスのこのセクションは、アイテムに関する基本情報を提供し、3 つの主要な領域で構成されています。
- キャプチャステータス - アイテムステータスをキャプチャ、編集、再キャプチャ、または修正編集に切り替えます。
- コメント - クリックすると、アイテム レベルのすべてのコメントにアクセスできます。
- 次へ/前へ - 選択したアイテムステータスフィルタに従ってアイテム間を移動するために使用します
手記: 手動で入力された、またはシステムに自動的にスキャンされたバーコードが商品に含まれている場合、商品情報領域にはバーコードボタンも表示されます。バーコードボタンをクリックすると、ポップアップウィンドウが起動し、アイテムのバーコードが表示されます。
先端:項目ステータスフィルターを設定して、プロジェクトをすばやく検索してナビゲートできるように結果を制限します。
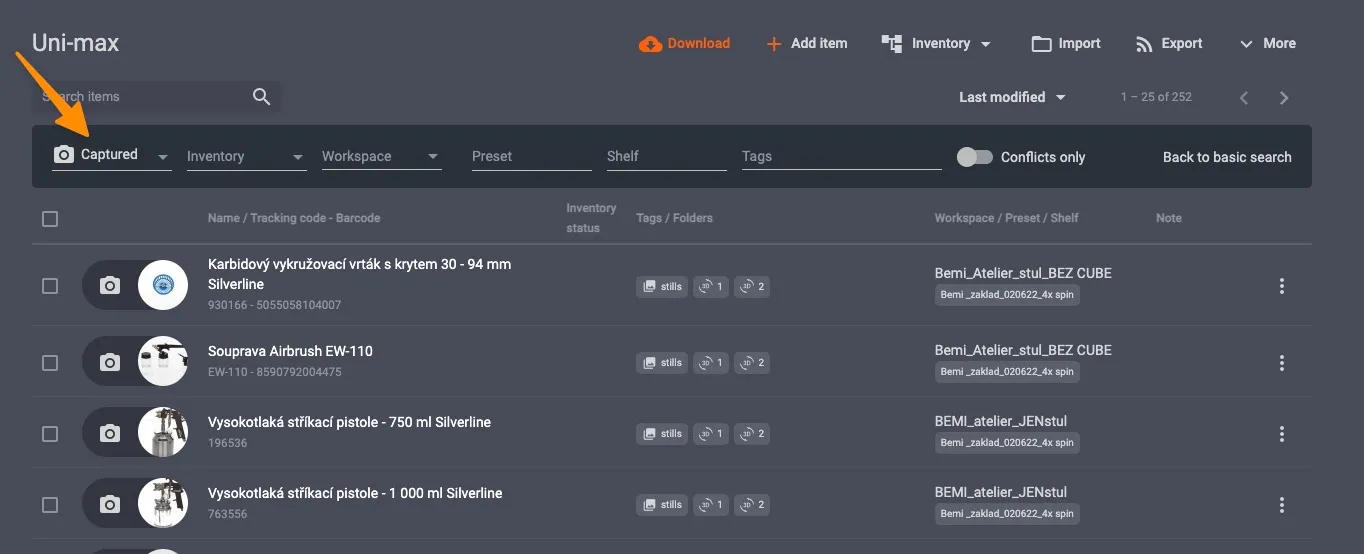
- 結果をフィルター処理して、マークされたアイテム (キャプチャ済み、編集済み、検証済み、承認済み、または拒否済み) のみを表示します。
たとえば、画像の検証を担当する場合は、結果を「編集済み」に制限して、すでに後処理されているアイテムのみを見つけて確認します。確認後、アイテムのステータスを「確認済み」または「編集修正」に設定して、変更を承認または却下し、チームメンバーに通知します。アイテムの状態は、画像を公開する準備ができたとき、またはさらに編集が必要なときに、責任者に通知します。
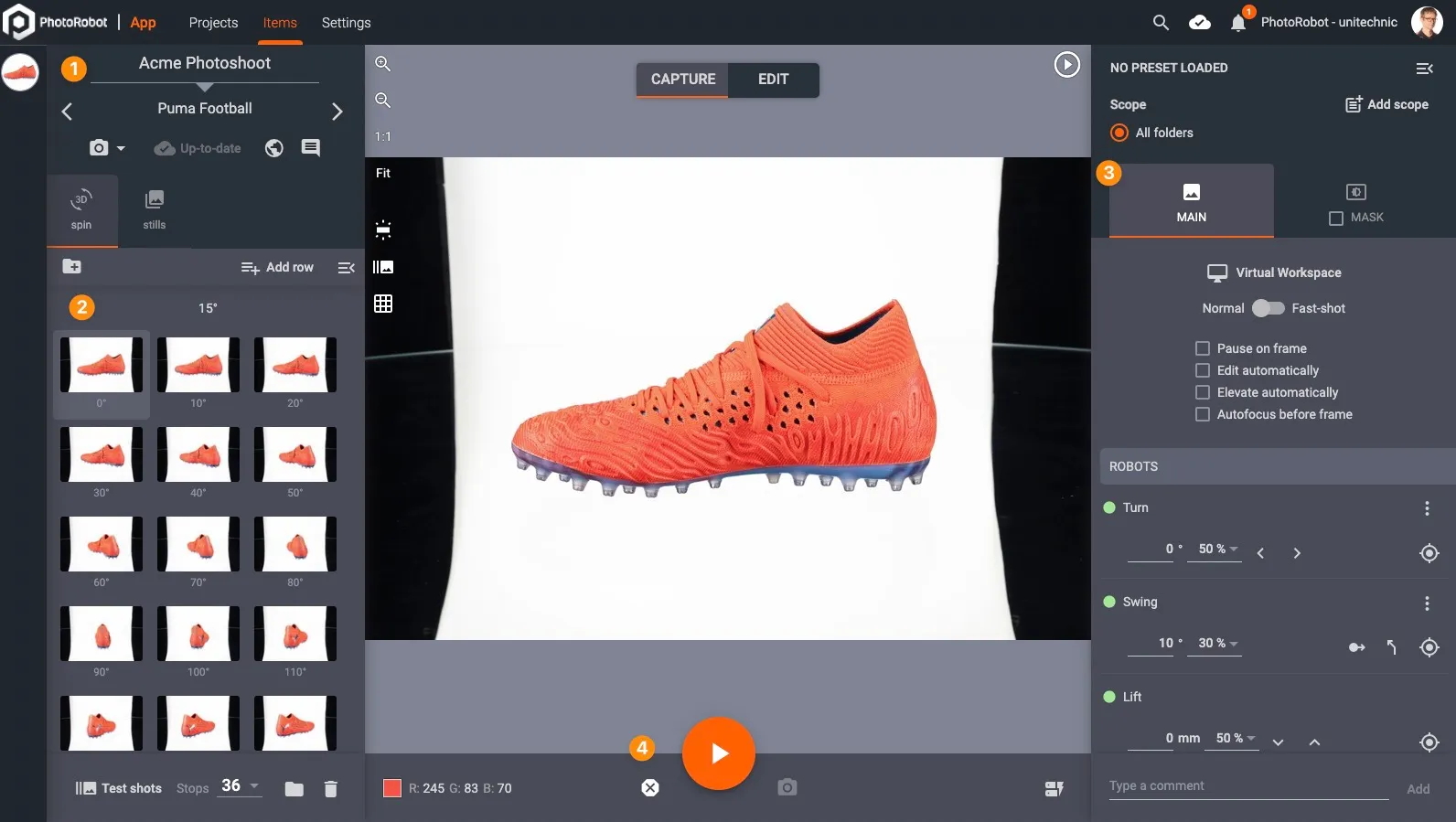
フォルダ、フレーム、画像
すべてのビジュアルアセットはフォルダに編成され、フォルダは異なるタイプの出力を表すように分割されます。フォルダーには、次の 3 つのタイプがあります。
- スピン (360 / 3D)
- 静止 画
- ビデオ
各フォルダには、個々のフレームが含まれています。フレームは、撮影角度に関する情報(写真処理の指示)と、画像の1つまたは2つのバージョンで構成されます。
- オリジナル - カメラが受信した元のファイル
- 編集済み - PhotoRobotの後処理ツールで編集された画像ファイル
フォルダインタフェースを次のようにナビゲートします。
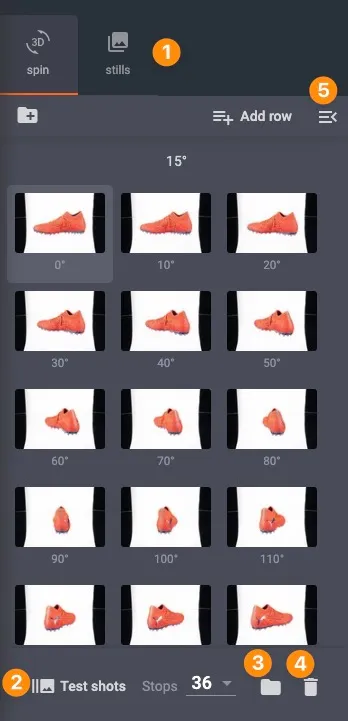
- フォルダから選択 (1)
- テストショットを撮って構成を試す (2)
- ローカルコンピュータのコンピュータで画像ストレージを開く (3)
- 再キャプチャのためのクリアな写真 (4)
- アクセスフォルダ メニュー* (5)
フォルダーメニューには、次の機能が含まれています。
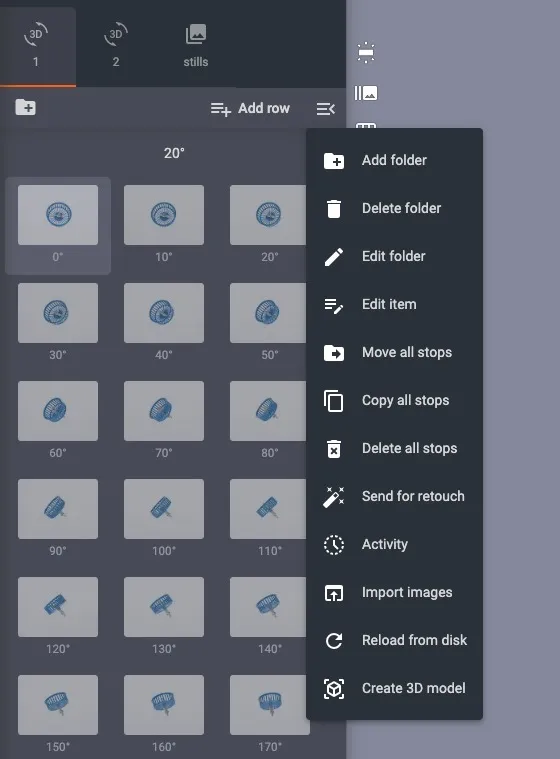
- フォルダの追加/削除/編集
- フォルダ間でフレームをコピー/移動する
- フレームの削除 - すべての画像と角度構成とともにすべてのフレームを完全に削除します
- レタッチ用に送信 - 外部レタッチ用にアイテムをマークする
- アクティビティ - アイテムのアクティビティログを表示する
- 画像のインポート - 独自の画像をアップロードする
- 3Dモデルを作成 - フォルダに含まれる画像から3Dモデルを生成します(*MacOSでのみ利用可能、複数のPhotoRobotがサポートする3Dモデル形式を使用)
また、各フレーム内には追加のメニューオプションがあります。
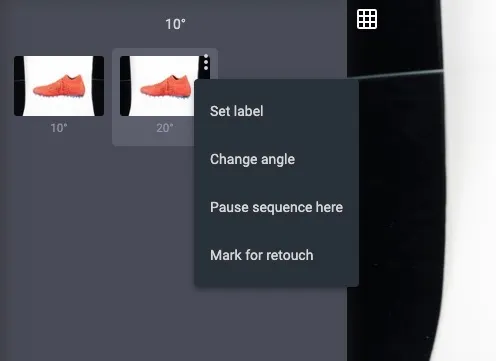
- ラベルの設定 - 個々のフレームのラベルを作成します(例:「ヒーローショット - 前面」、「3 / 4」、「背面」、または GS1画像命名規則)
- 角度の変更 - 個々のフレームの角度を調整する
- ここでシーケンスを一時停止 - このフレームで写真シーケンスを一時停止し、オペレータが撮影を再開するのを待つ場合に選択します。
- レタッチ用にマークする - 外部、サードパーティのレタッチ用に画像を指定する
シーケンス制御
シーケンスを開始するには、画面下部の 再生 ボタン (1) を押します。
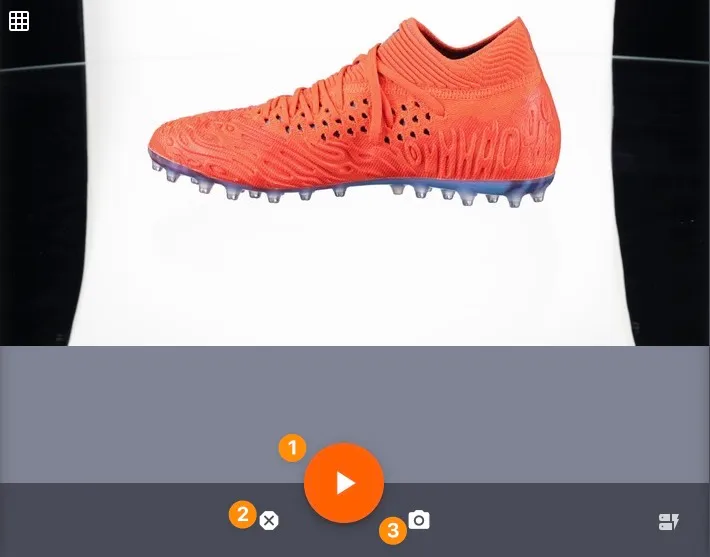
非常停止ボタン(2)でいつでもシーケンスを中断できます。
静止画フォルダで、スナップショットを 撮る ボタン(3)を使用して、フレームを最初に定義せずにキャプチャします。スナップショットがキャプチャされ、新しいフレームとして静止画フォルダに含まれます。
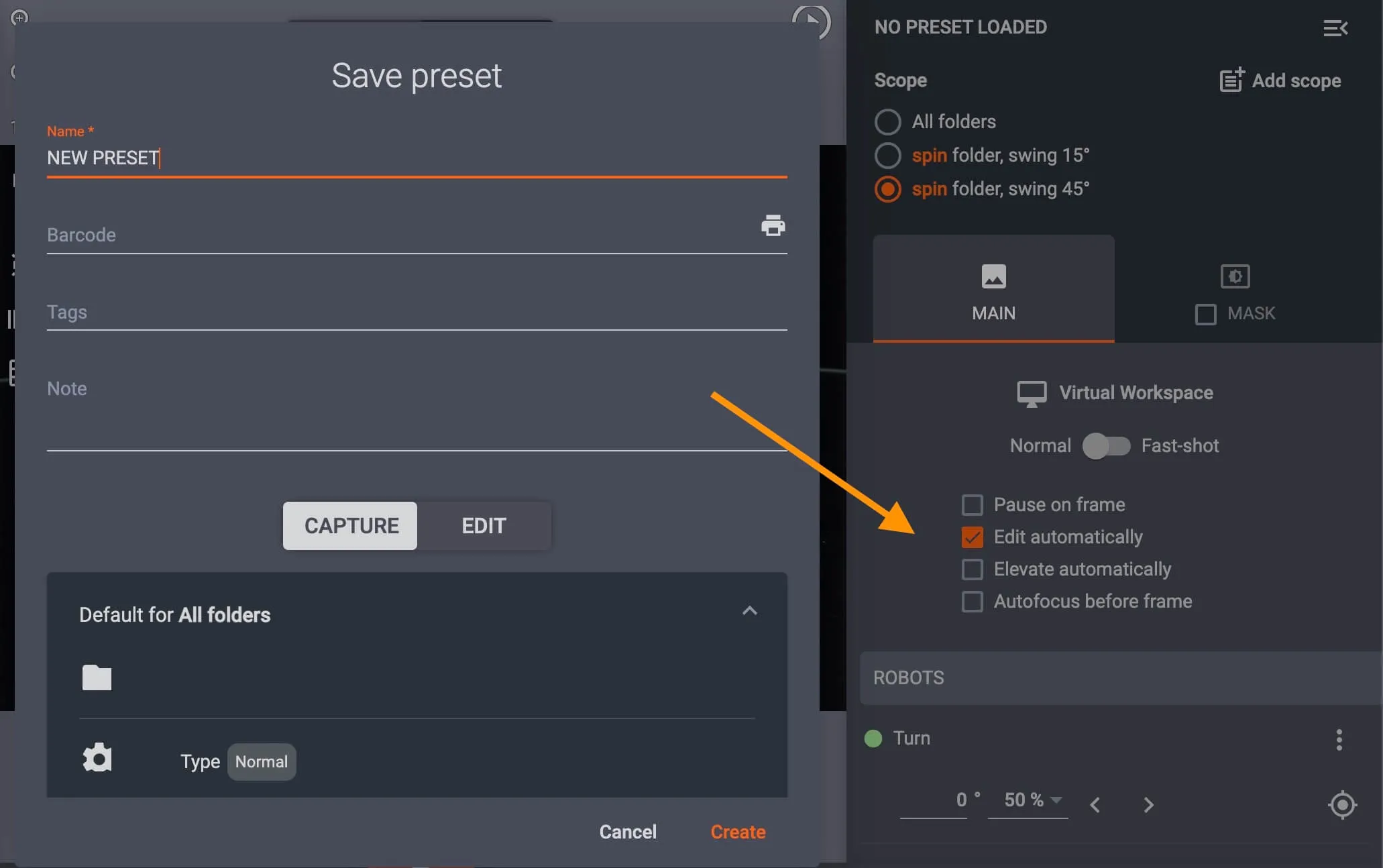
シーケンスオプション
CAPP インターフェイスの右側のパネルに沿って、シーケンス オプションを構成します。シーケンスオプションには次のものがあります。
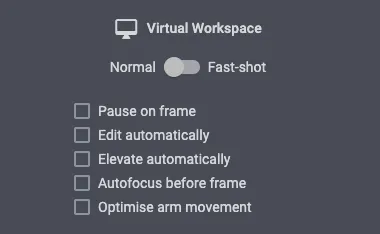
- ワークスペースの構成 - ワークスペースへのアクセスまたはワークスペース間の変更
- ノーマルとファストショットのトグル - 写真を撮る前にターンテーブルの回転を一時停止するか(ノーマル)、またはシーケンスを大幅に高速にするには、ノンストップ回転中に写真を撮るように設定します(ファストショット)
- フレーム上で一時停止 - ターンテーブルの回転を各フレームの後に停止するようにオンに切り替えます(製品アニメーションを作成するときに便利です)
- 自動編集 - キャプチャ直後に編集を自動化するように構成
- 自動昇格 - シーケンスを開始する前にプロダクトの中心に自動昇格を有効にする (アイテム寸法を使用)
- 腕の動きを最適化する - シーケンス後、腕は最後に撮影された列の位置のままになります。次のシーケンスは、この位置から始まります。
紡ぐ
スピンフォルダで、360度の製品写真のオプションを見つけます。
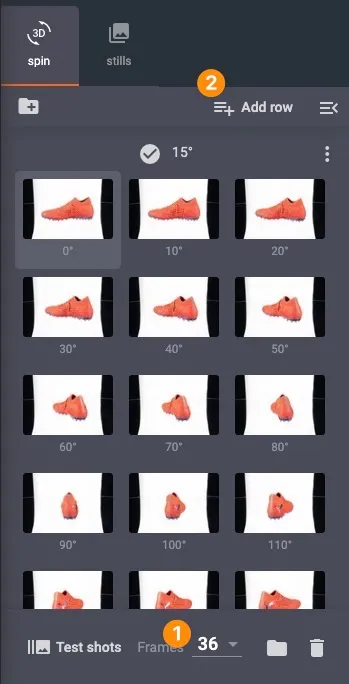
フレーム(1)を設定して、回転ごとにキャプチャするフレーム数 ( 24、36など)を選択します。 [行の追加] (2) を使用して、別のスイング角度 (カメラがオブジェクトを指す垂直角度) から追加の行をキャプチャするように指定します。
静止 画
静止画フォルダにキャプチャするフレームを定義するには、インターフェイスの右上隅にある [フレームを追加] を使用します。

または、[ スナップショットを撮る] を押して、同時に写真を撮り、対応する新しいフレームを作成します。WiFi経由でカメラを接続して手で写真を撮り、新しいフレーム(クローズアップ、詳細ショット)を静止画フォルダに自動的に追加します。
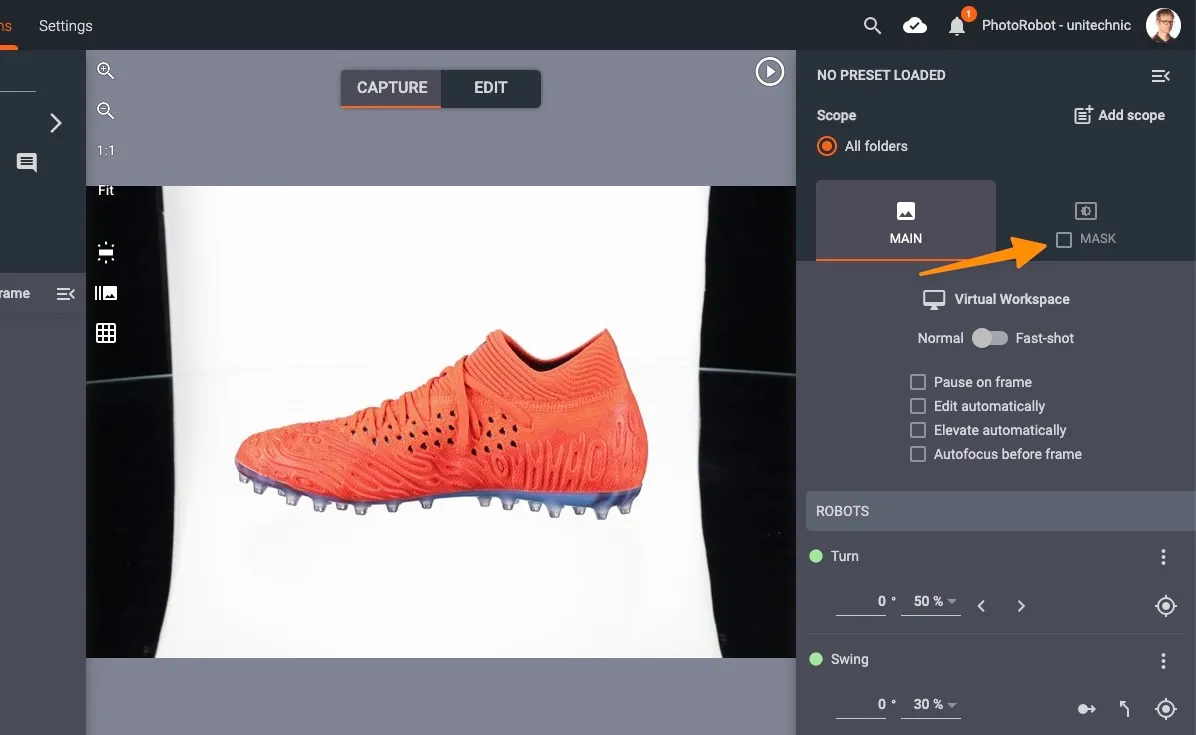
フリーマスクの背景除去
フリーマスクの背景の削除は、フレームごとに 2 つのイメージがキャプチャされるプロセスです。
- メイン画像 - オブジェクトの標準写真
- マスク画像 - 後ろから照らされたオブジェクトの写真


次に、これら 2 つの画像が合成され、オブジェクトの周囲の背景が効果的に削除された写真が作成されます。

フリーマスクを有効にするには、右側のパネルにある 「マスク」 チェックボックスを選択します。
ハードウェア構成
ロボット
ロボット(またはロボットの組み合わせ)に応じて、最大3種類のロボット動作があり、各動作の位置、速度、キャリブレーションの制御オプションがあります。
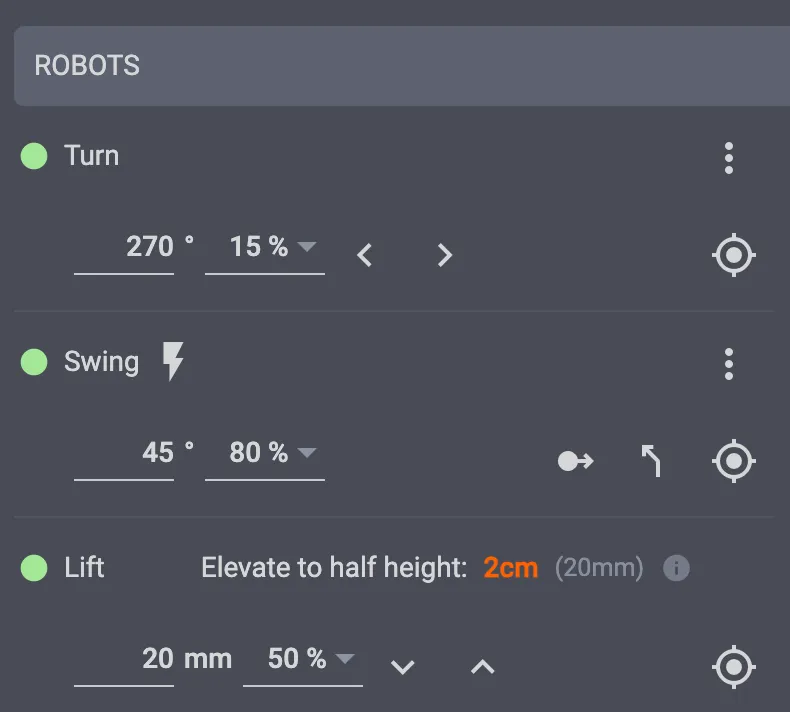
- ターン - ほとんどのPhotoRobotデバイスに標準装備されているターンは、ユーザーがターンテーブルの中心を中心に回転を制御できるようにします
- スイング - カメラがオブジェクトをターゲットとする垂直角度を設定します(つまり、ターンテーブルと水平を維持するには0°、製品を見下ろすトップビューの場合は90°に)
- リフト - カメラの仰角を設定する
位置、速度、およびキャリブレーション設定は、ターン、スイング、およびリフトの構成可能なオプション内で見つけます。
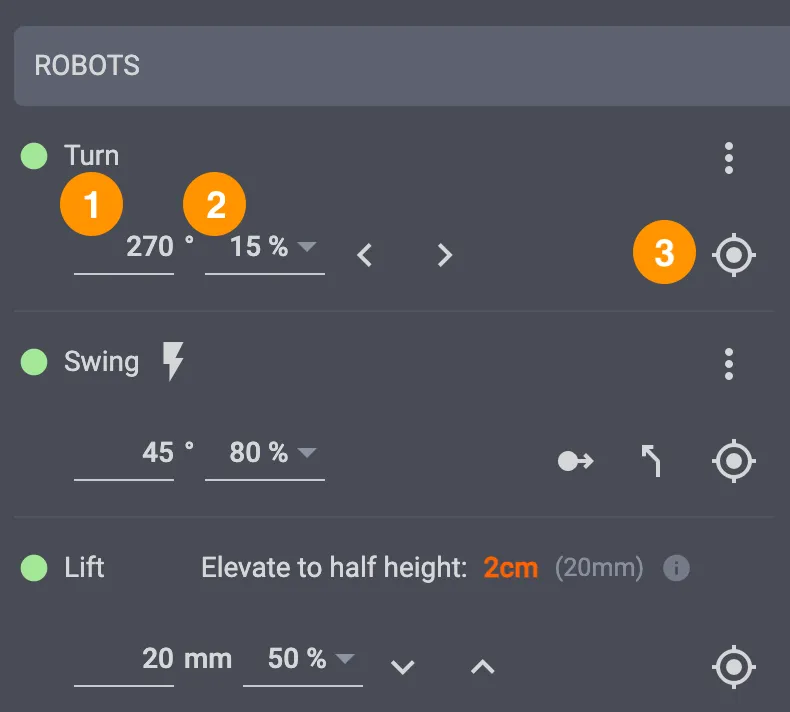
- 位置 ステータスの設定( 1)を使用して、ロボットを移動します。
- 速度入力(2)を使用して移動速度を設定します。
- キャリブレーションボタン(3)を使用して、ロボットを開始位置に設定します。
初めて動きを設定する場合は、常にキャリブレーションを使用してロボットを初期位置に設定してください。
さらに、CAPP バージョン 2.13.3 以降、キャプチャ モード インターフェイスに [ターン] と [スイング] のクイック アングル プリセットが設定可能です。ターン/スイングフィールドの横にある 3 つの垂直ドットをクリックし、 角度プリセットを設定をクリックします。
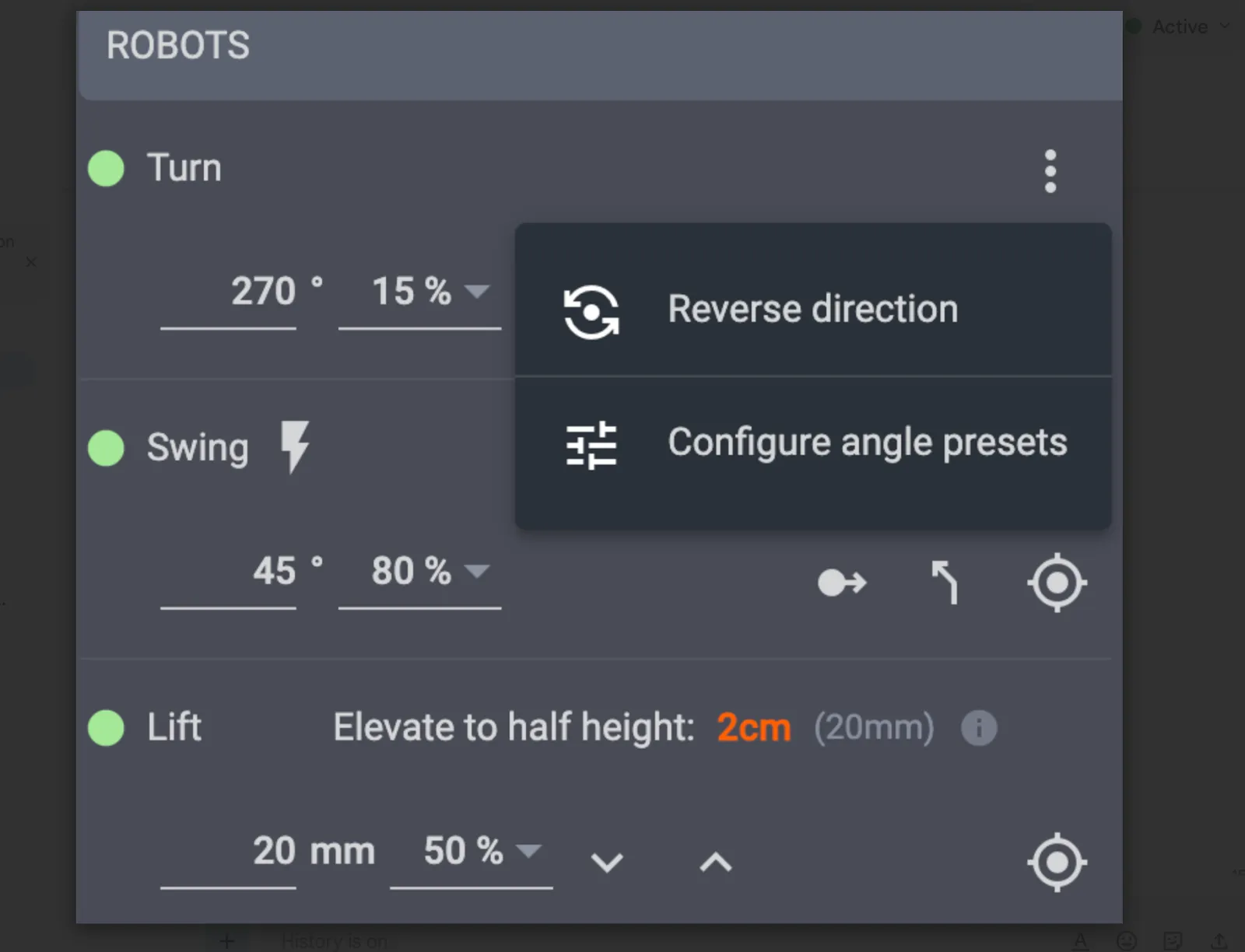
これにより、ユーザーが希望のターンまたはスイング角度をカンマ(最大4)で区切って入力するためのポップアップウィンドウが起動します(例:0、90、180、270)。
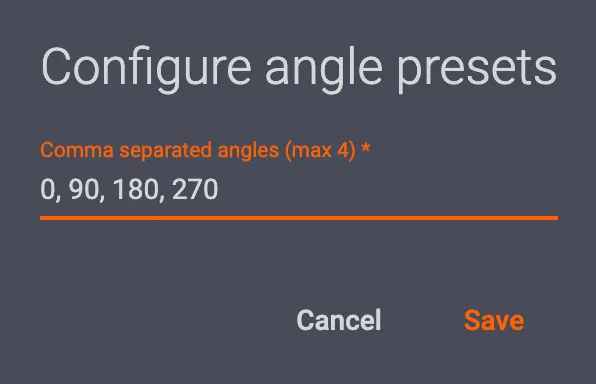
保存をクリックすると、プリセットのスイング/ターン角度がロボット設定に適用されます。

カメラ
カメラインターフェイスを介してシーケンスに対して1つまたは複数のカメラを有効にします。

ライブビューアイコン (1) をクリックすると、ライブビュー画像をクリックしてフォーカスポイントを選択できます。カメラを除外アイコン (2) を使用してシーケンスからカメラを除外します。 除外されたカメラは、シーケンス中にトリガーされません。通常、これは、ユーザーがWiFi経由で追加のカメラを接続して、定義済みのスピンと静止画と一緒に手で写真を撮る場合に便利です。
注: 詳細については、PhotoRobotサポートマニュアルのカメラ設定を参照してください。
ライト
CAPPはストロボライト(BroncolorまたはFOMEI)と、DMX対応のあらゆるLEDライトの両方をサポートしています。CAPPでのライトのインストールと設定方法については、PhotoRobotマニュアルのワークスペースの設定を参照してください。
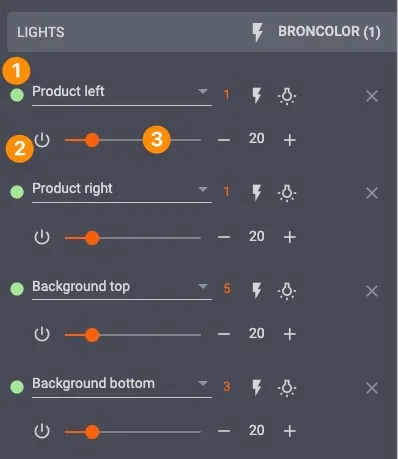
CAPP ライト インターフェイスで、ライト位置メニュー(1)を使用して個々の ライトに位置 を割り当てます。ドロップダウンメニューを使用して、カスタムポジションまたは定義済みポジションのいずれかを選択します。事前定義されたポジションには以下が含まれます。
- 製品左/製品右 – 正面から製品を照らすように配置されたライト
- 背景トップ/背景ボトム - 白い背景を作成するために背後から背景を照らすライト
カスタム職位を定義するには、[ 職位 ] リスト オプションから [カスタム職位] を選択します。
電源ボタン(2)を使用してライトのオン/オフを切り替えます。これは、たとえば、マスク画像を撮影するためにフロントライトをオフにする必要があるフリーマスクアプローチに役立ちます。
ライト強度スライダー (3) を左から右に動かすと、照明が暗くなったり明るくなったりします。注: DMX 制御ライトの中には、色温度を制御できるものもあります。
スコープとプリセット
既定では、ハードウェア構成はアイテム内のすべてのフォルダーで同じです。
ハードウェア設定を (フォルダーごとまたは行ごとに) カスタマイズするには 、[スコープの追加] ボタンを使用します。
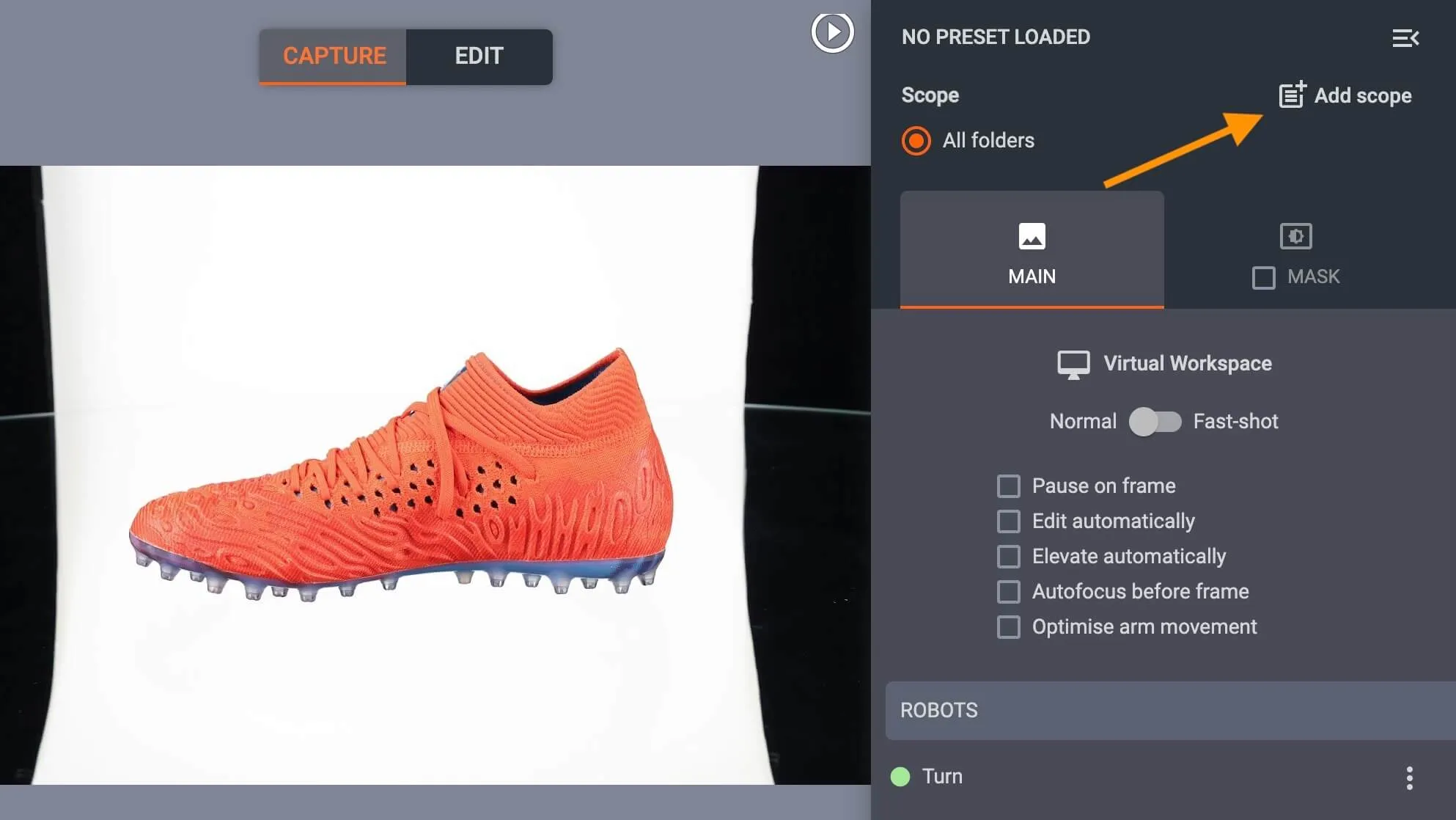
設定をカスタマイズした後、プリセットのドロップダウンメニューから右上隅の設定をロードまたは保存します。
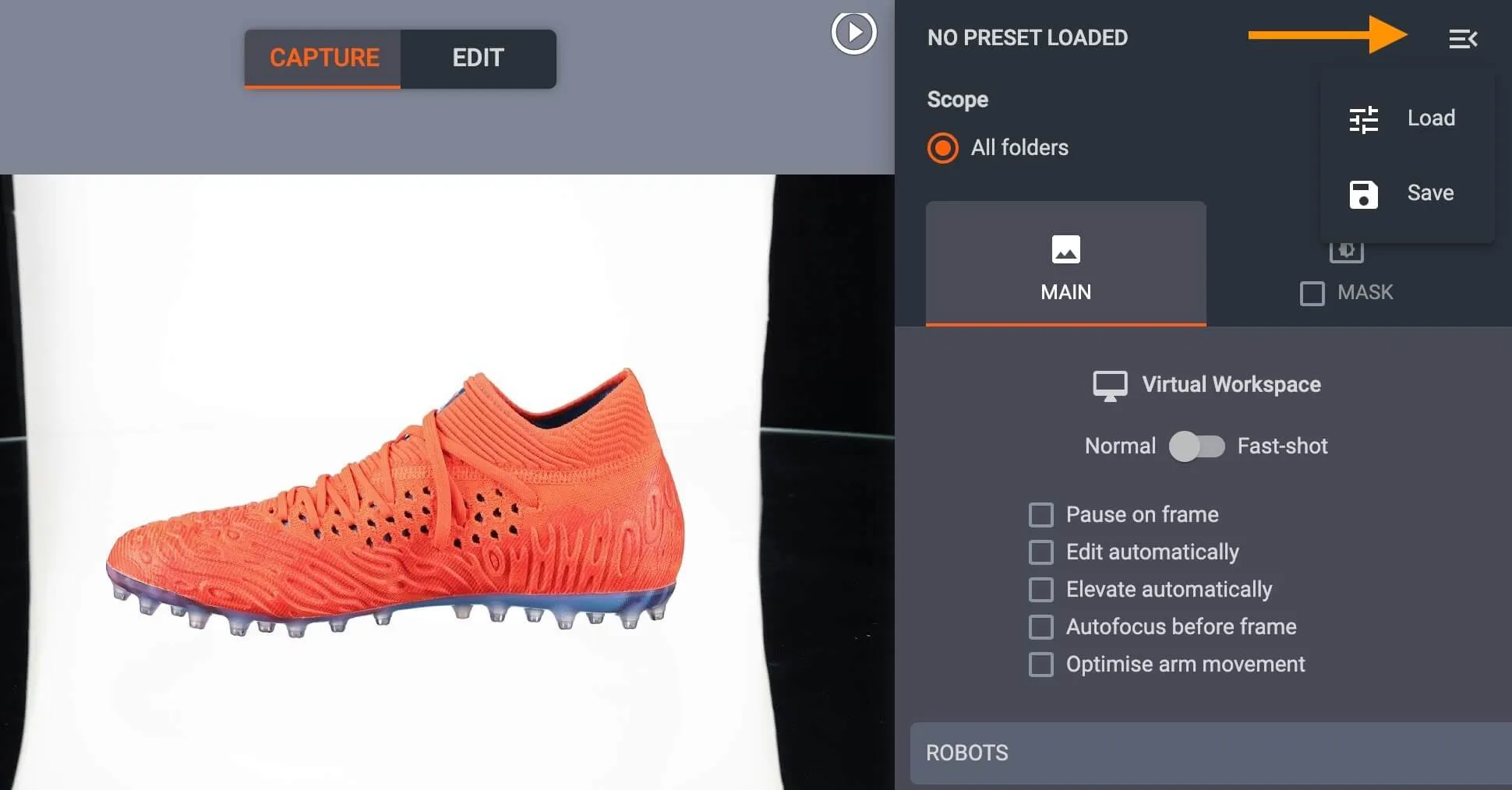
- ファイルアイコンをクリックしてすべてのキャプチャ設定を保存し、後で構成をロードして同様の写真撮影で再利用します。
プリセットの割り当て
CAPPでは、1つまたは複数のアイテムのプリセットをロード/割り当てる3つの方法があります。
1.アイテムを選択し、インターフェイスの右上にあるドロップダウンメニューアイコンからプリセットをロードします。
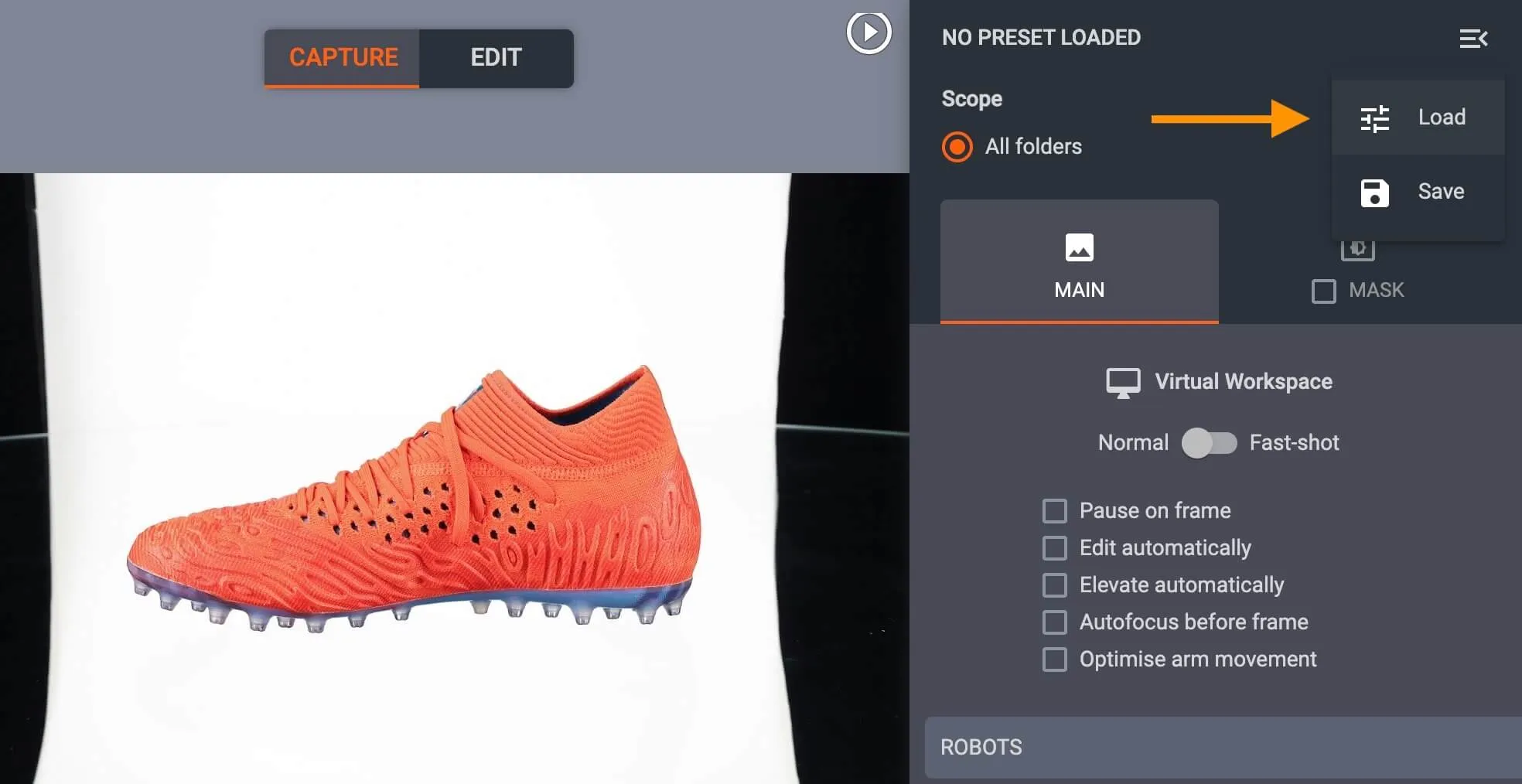
- または、ホットキー「P」を使用して保存されたプリセットを開きます。次に、アイテムに適用する構成を選択します。これにより、撮影されるフレーム用のフォルダーが、すべてのキャプチャ設定と事前定義された編集操作とともに作成されます。
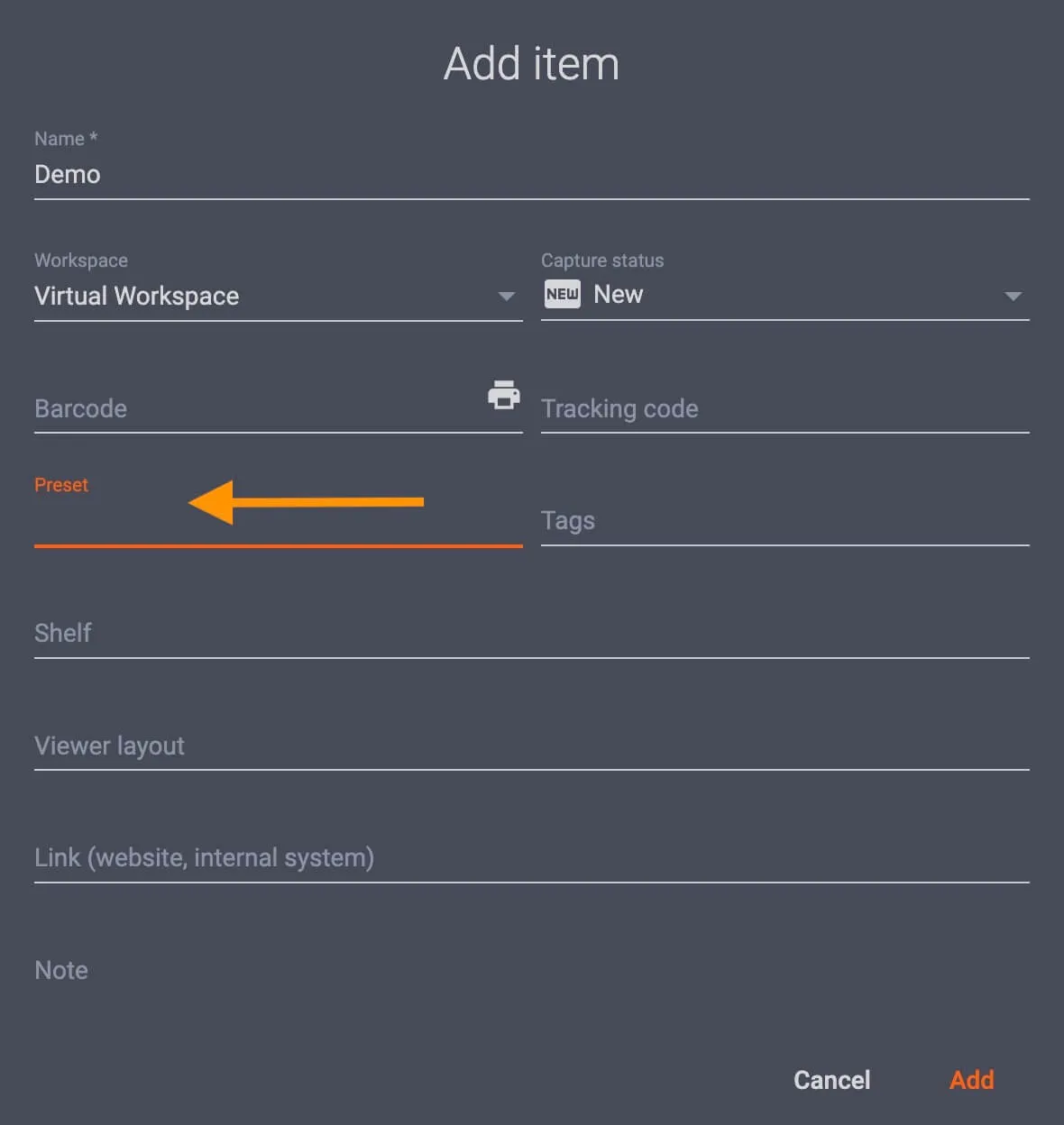
2. アイテムを作成する際、ユーザーは「アイテムの追加」メニューから「プリセット」フィールドをクリックして構成を選択できます。
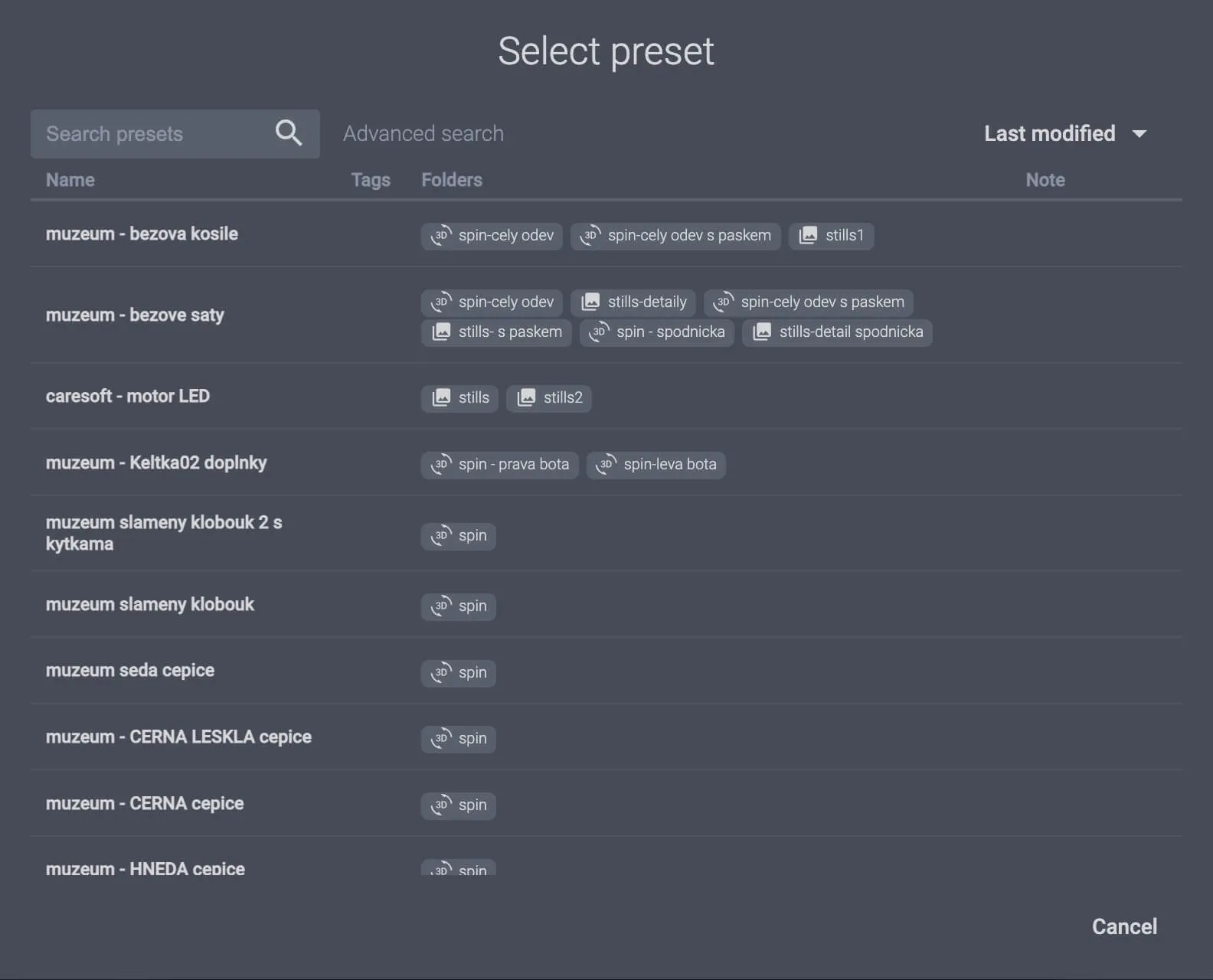
- プリセットを複数のアイテムに割り当てるには、アイテムメニューからアイテムを選択し、「 プリセットの割り当て」をクリックします。
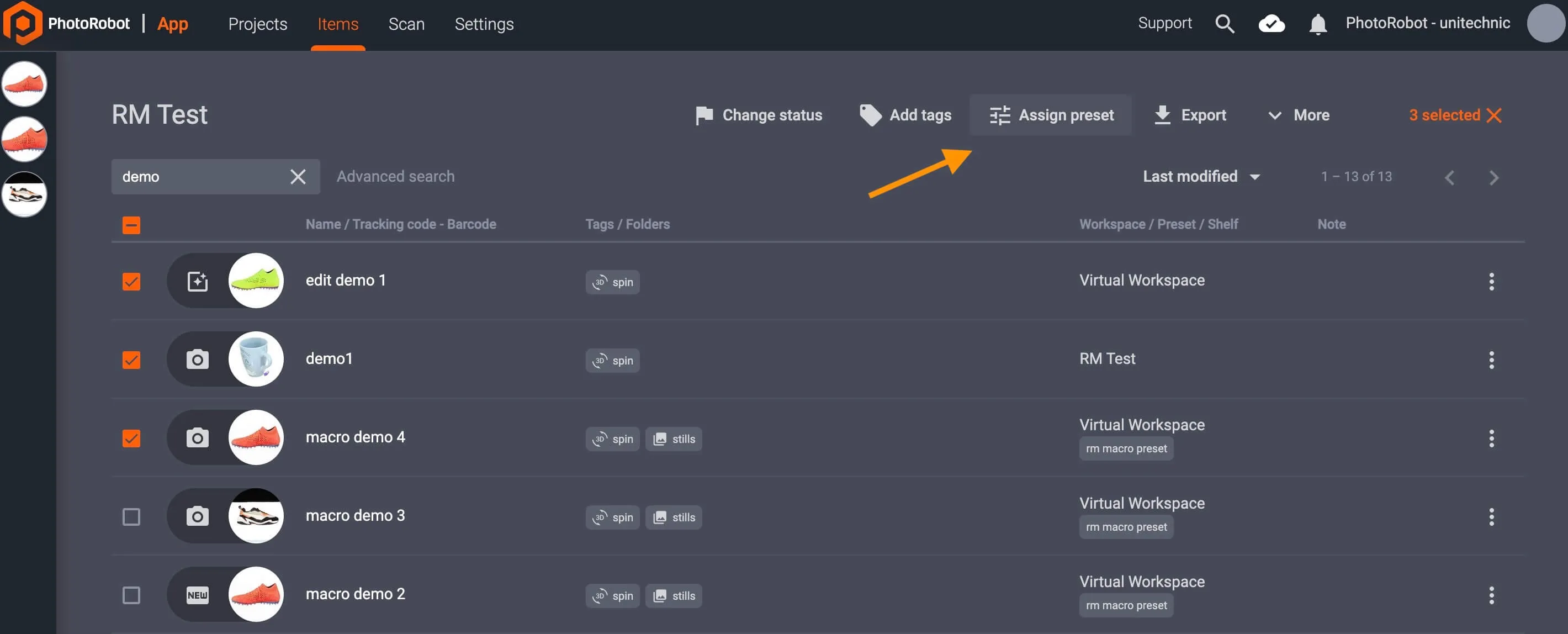
- プリセットを名前で選択し、「 プリセットの割り当て 」をもう一度クリックしてアイテムに割り当てます。

3. または、[アイテム] メニューで [インポート] をクリックして、CSV からアイテムを インポート します。
- CSV インポート機能を使用すると、PhotoRobotユーザーは Excel でその構成を使用してアイテムを作成し、システムにインポートできます。
- CSV ファイルには、次のカスタマイズ可能な列と、プリセット名でプリセットをアイテムに割り当てる 1 つの関数を含めることができます。
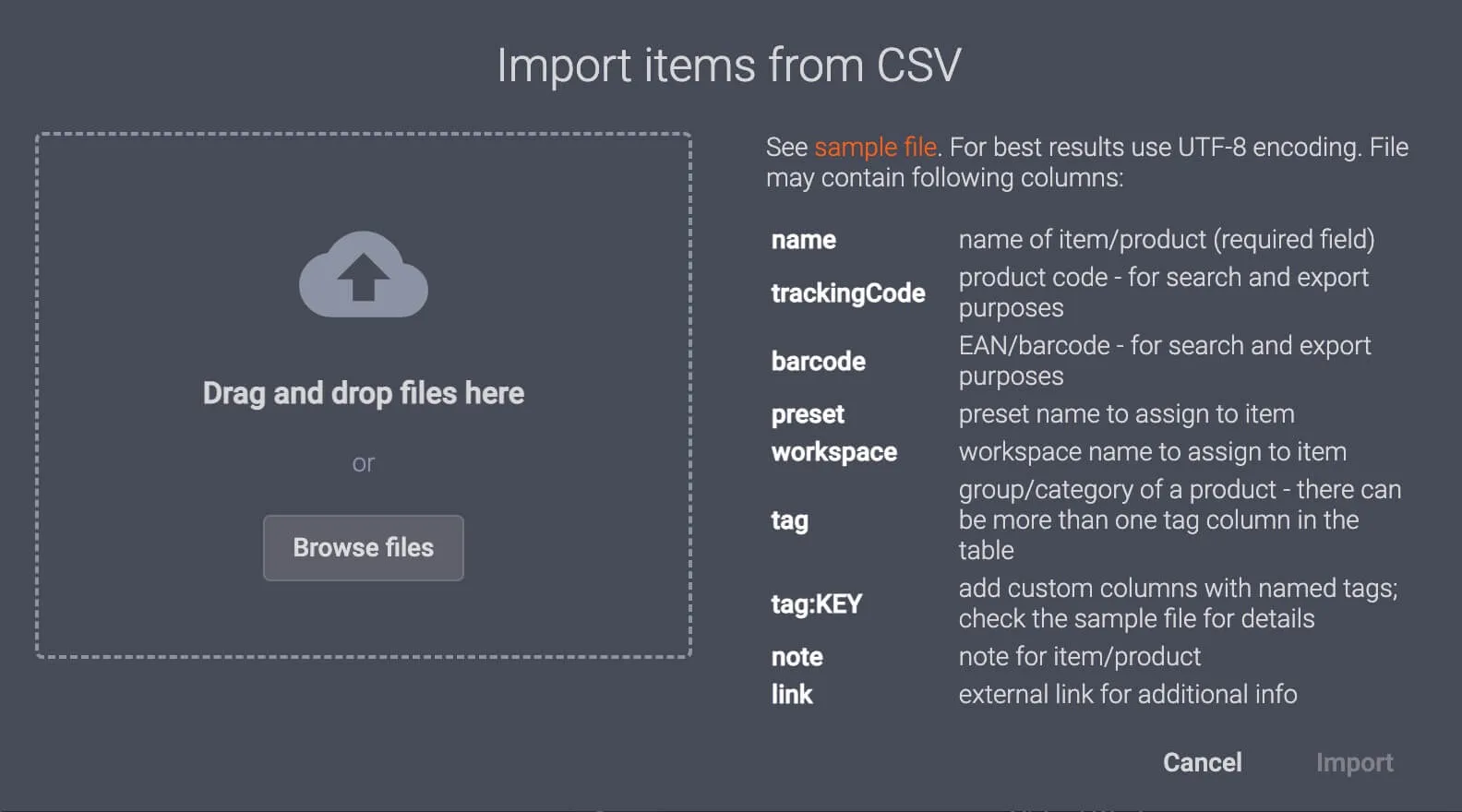
( ! ) - 注: CSV インポートを使用する場合は、最良の結果を得るために UTF-8 エンコードをお勧めします。
棚(カート)へのアイテムの仕分け
さらに、CAPPでは、アイテム をシェルフ (または カート)に並べ替えると、アイテムにシェルフを割り当てた後にワークスペースとプリセットを自動的に設定することで、ワークフローを簡素化できます。
システムでシェルフ(またはカート)コードを作成すると、構成可能な写真撮影設定を使用してアイテムをカテゴリに分類するのに役立ちます。商品に棚を割り当てるには、アプリで設定を構成するか、バーコードリーダーサポートのCAPP統合を使用します。
バーコードリーダのサポートにより、チームは 独自のバーコードを印刷 し、スキャンするだけで商品を棚に割り当てることができます。このようにして、チームはシェルフコードをスキャンしてからアイテムをスキャンして、マウスをクリックしたり、ワークステーションコンピューターに移動したりすることなく、写真撮影の設定をすばやく割り当てることができます。
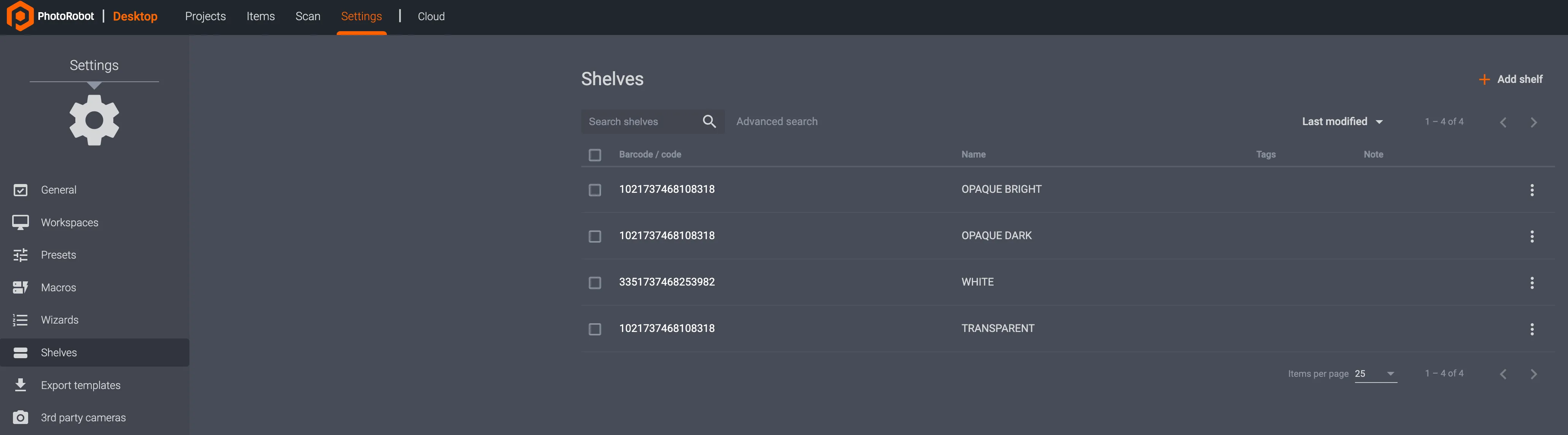
CAPPで シェルフ 設定にアクセスするには、アプリのローカルバージョンまたはクラウドバージョンで [設定 ]を開きます。
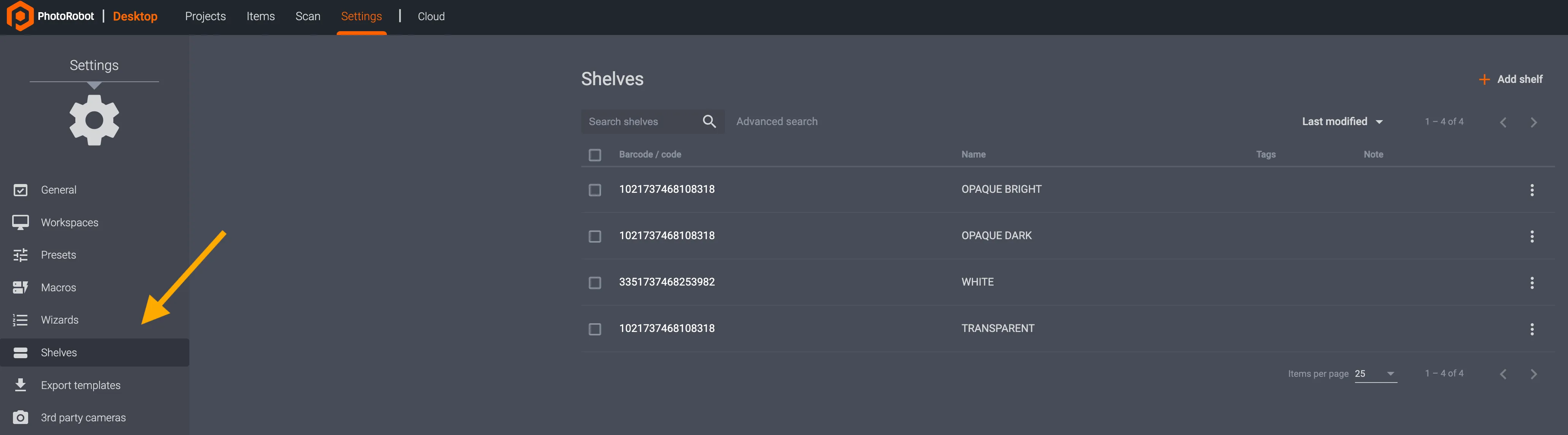
- 設定インターフェースの左側にある シェルフ メニュー項目をクリックして、保存したシェルフ(存在する場合)を表示します。
- 詳細検索でシェルフを検索するか、シェルフバーコード/コードの左側にあるボックスからシェルフを選択します。
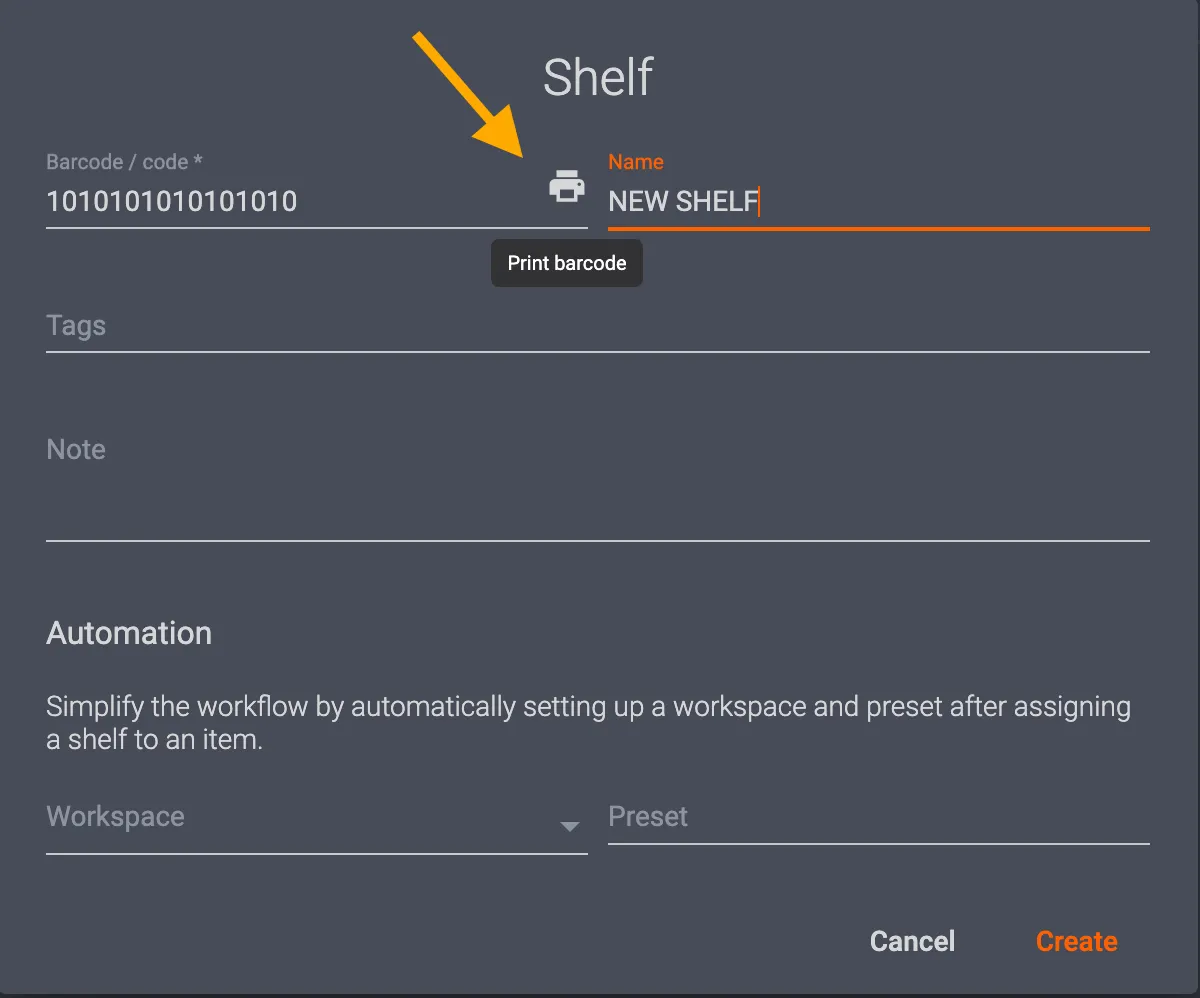
新しいシェルフを作成するには、シェルフメニューの右上隅にある 「+ シェルフを追加 」を使用します。
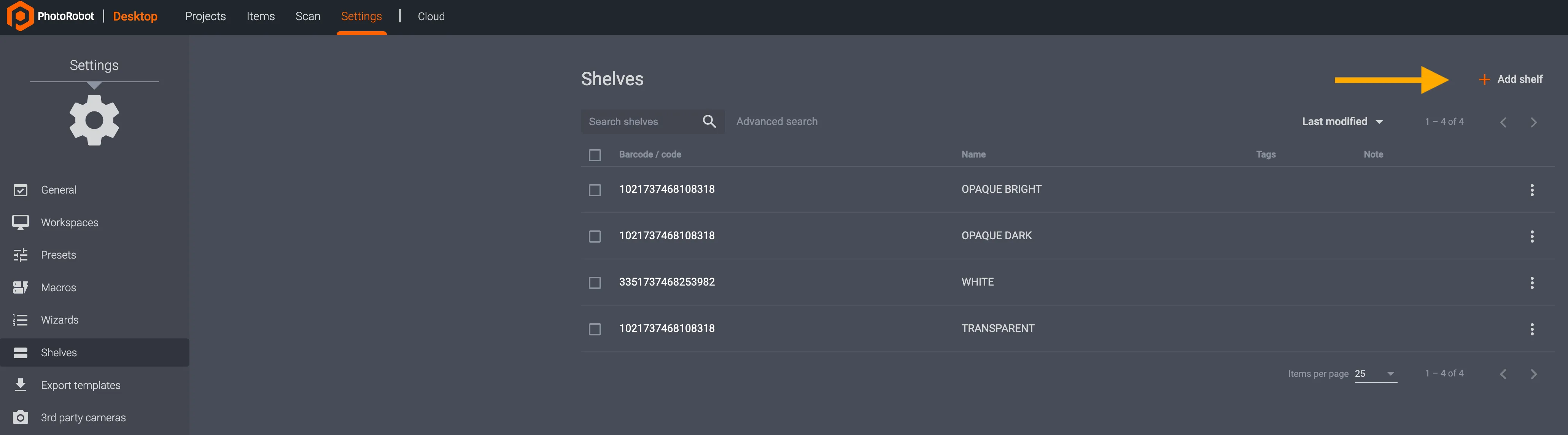
新しいシェルフ設定により、バーコードリーダー、名前の作成、タグ、メモ、ワークスペース、プリセットの選択で使用するカスタムバーコード/コードの作成が可能になります。
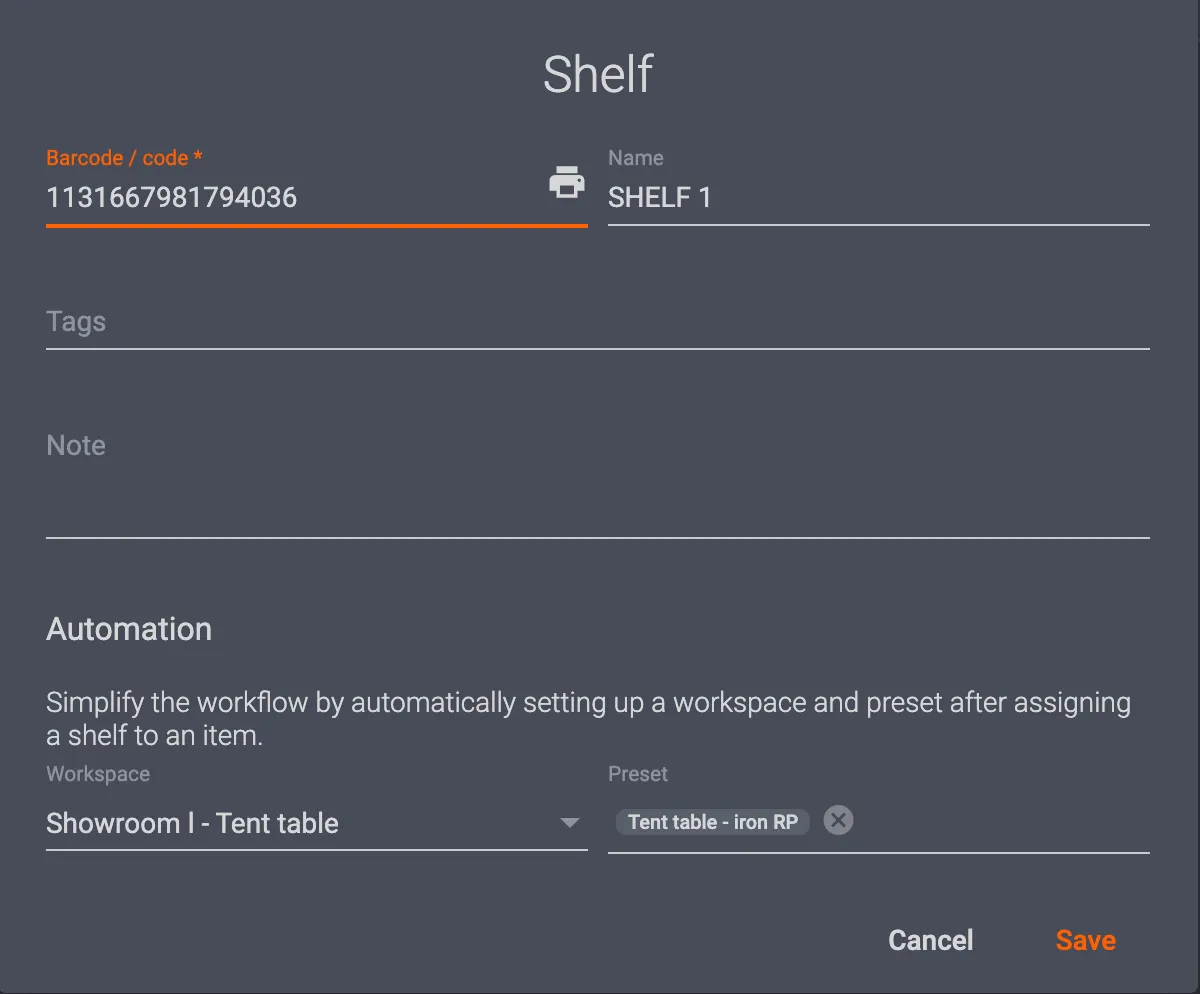
- バーコード/コードは カスタマイズ可能で、システムがバーコードリーダーを介して設定を割り当てるために使用できる一意のシェルフコードを作成できます。
- 名前 は、撮影されるオブジェクトの種類を区別するためによく使用されます。靴、宝石、衣類、または同様の種類のオブジェクトとの比較。
- ワークスペース フィールドと プリセット フィールドは、ロボット ワークステーション (およびスタジオ内の場所) によって構成でき、シェルフの自動キャプチャとポスト処理設定のプリセット フィールド。
- インターフェースの右下隅にある[保存]は、アプリまたはバーコードリーダーを介して将来割り当てるためのシェルフをシステムに作成します。
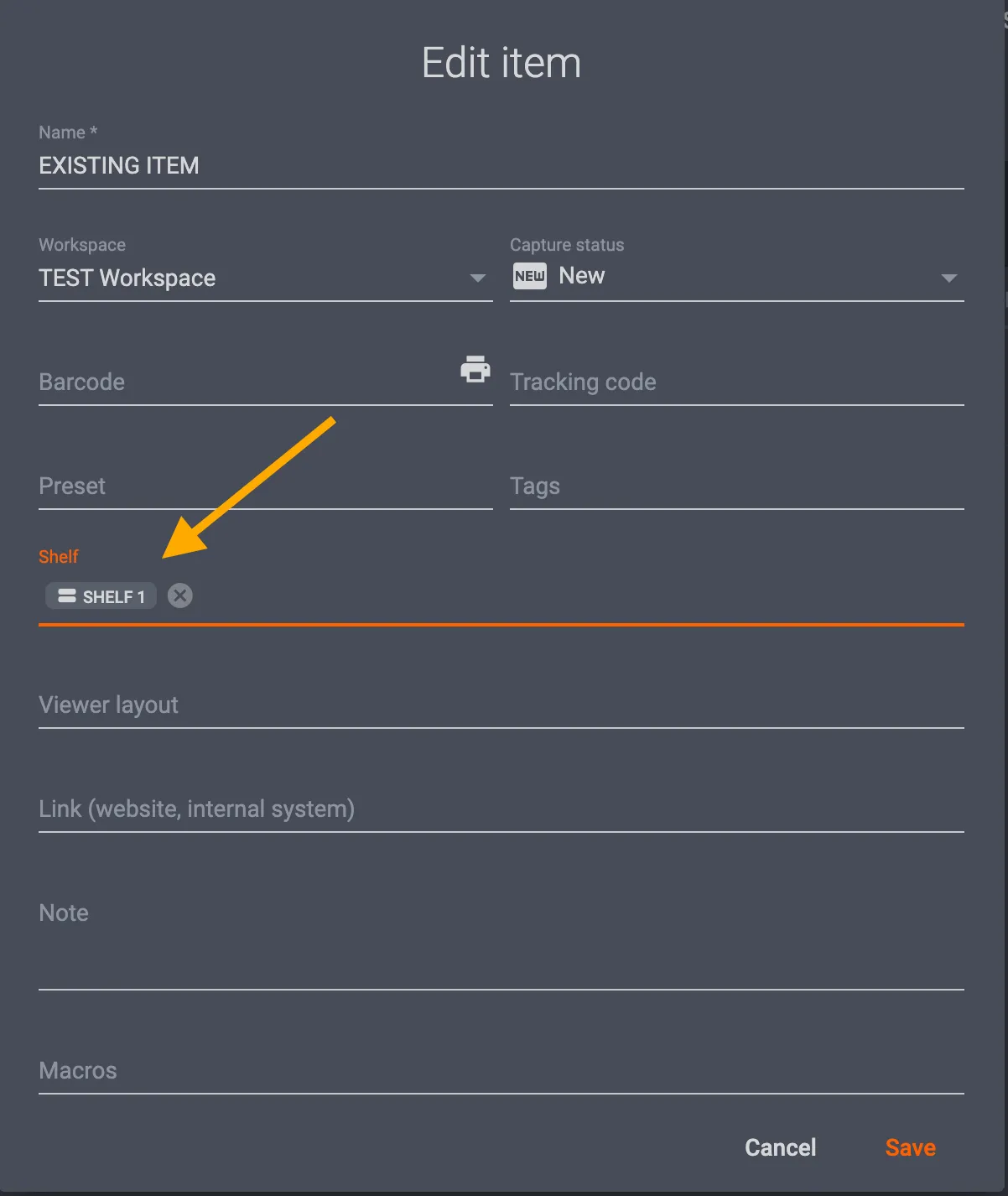
後で、アプリ内の新規または既存のアイテムにシェルフ コードを割り当てるには、アイテム設定メニューのシェルフ フィールドを選択し、シェルフを選択してアイテムに割り当てます。
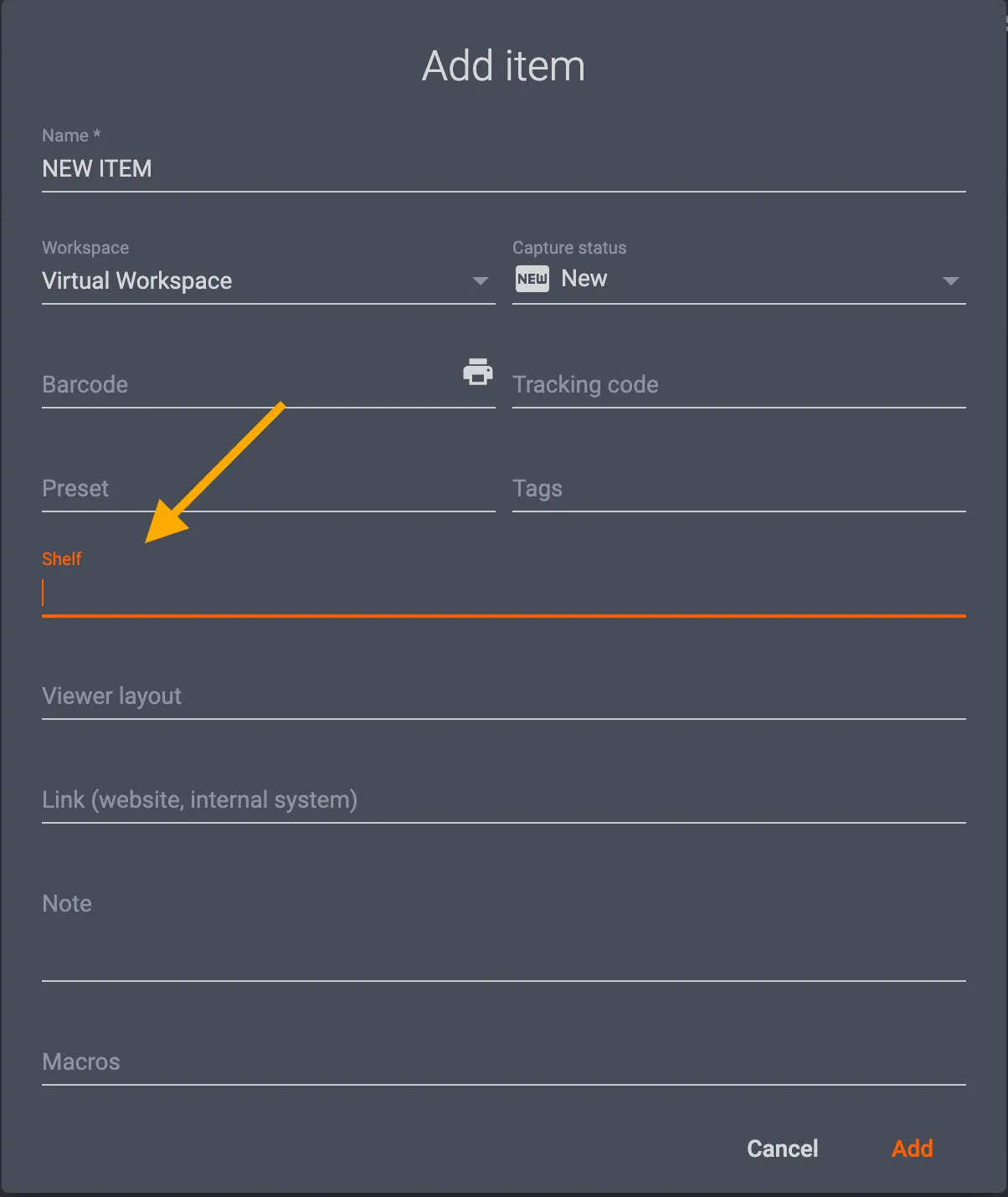
注: プロセスは、システム内でキャプチャする既存のアイテムにシェルフを適用する場合と同じです。アイテム設定を選択し、[ シェルフ] フィールドを設定するだけです。
または、統合されたバーコードリーダーを使用している場合は、一意のシェルフコードを印刷し、それをアイテムバーコードと一緒に使用して、ワークステーションとプリセットごとに製品とシューティングリストをすばやく整理します。

設定の追加スコープ操作
主に、設定スコープを構成すると、キャプチャした画像を保存するフォルダー、キャプチャするフレーム、およびキャプチャ プロセスの設定がシステムに指示されます。スコープ設定には、シーケンス構成(通常モードと高速ショットモード)、ロボットの速度、カメラ設定、ライトコントロール、および事前定義された編集操作も含まれます。
アイテムを撮影する前に、ユーザーはシステムでプリセットを作成または割り当てます。プリセットの設定は、フォルダー全体、特定のアイテム、または個々の行とフレーム(編集モード)に適用できます。
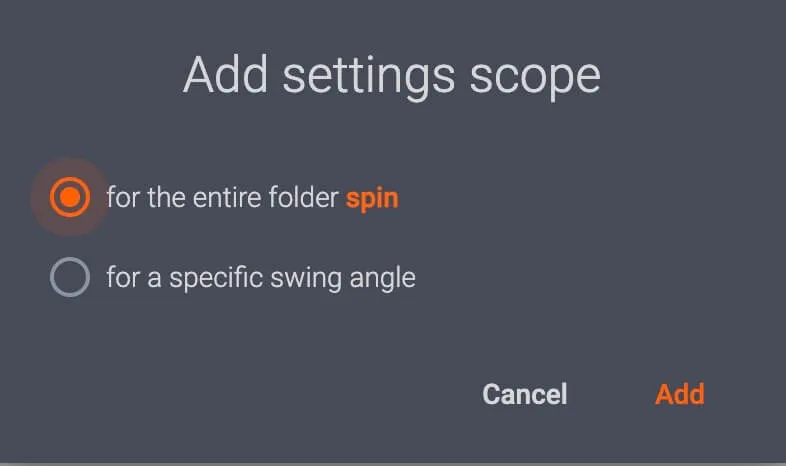
- フォルダー全体のスピン、特定のスイング角度、または現在の画像のみ(編集モードのみ)の設定範囲を選択します。
- 各設定スコープには、ハードウェア構成、キャプチャ設定、および 1 つ以上の編集操作が含まれます。
特定のスイング角度の設定範囲を追加
特定のスイング角度にスコープ設定を適用する場合は、キャプチャプリセットを適用する角度を指定します(例:15°、45°など)。
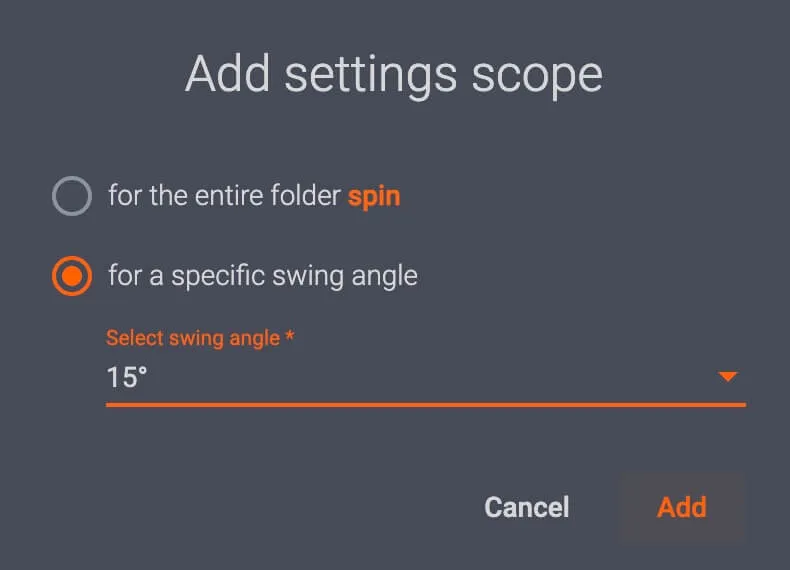
- 設定スコープは、[ スイング角度の選択] を使用して 1 つ以上のスイング角度に適用できます。スイング角度を指定し、[ 追加 ] をクリックしてスコープ設定をフォルダーに割り当てます。
- プリセットが割り当てられたターゲットフォルダが、インターフェイスの右上部分に表示されます。
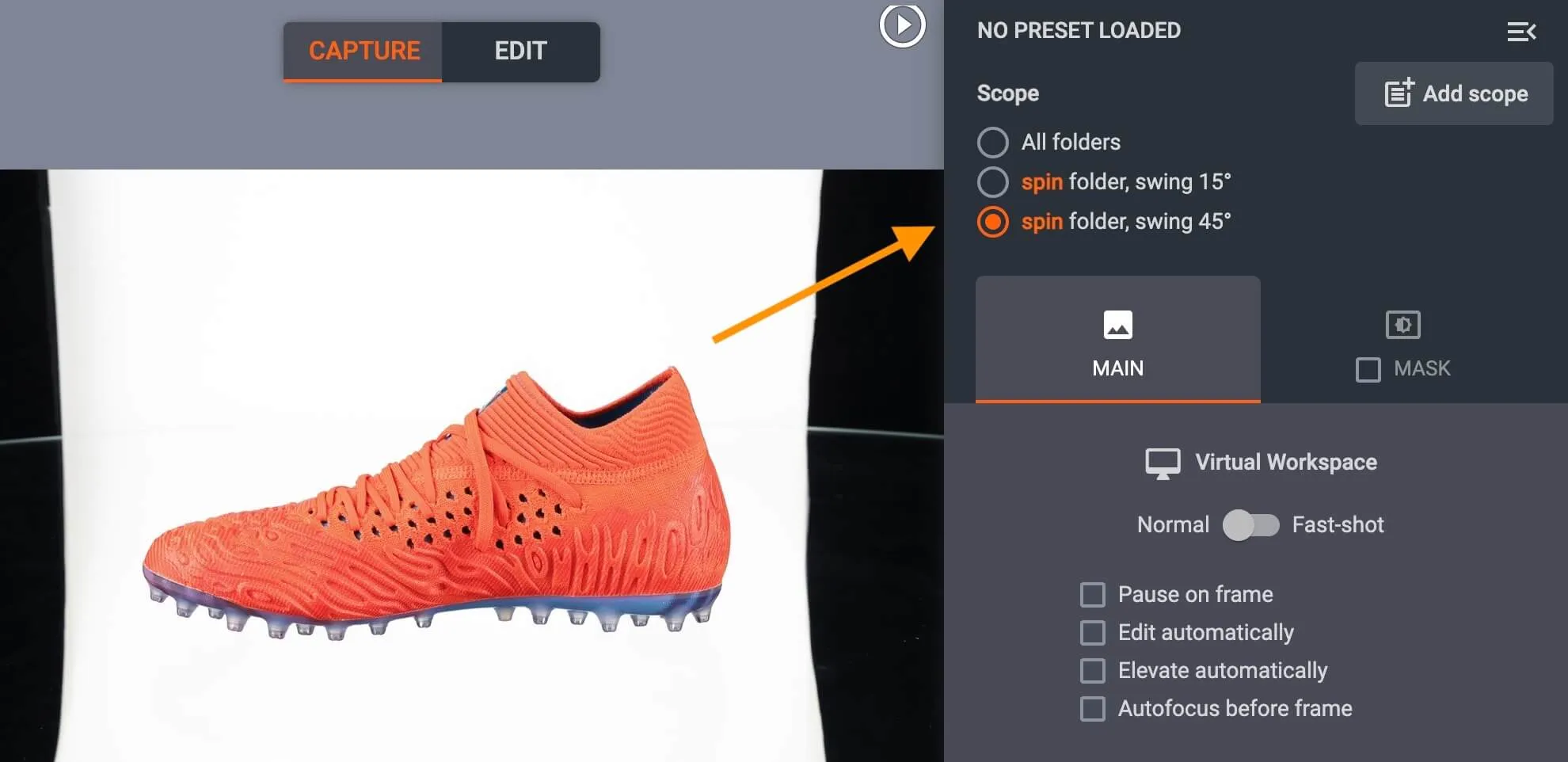
複数のスイング角度に異なるスコープ設定を適用する場合は、特定のスイング角度をクリックして、そのフォルダーに割り当てられた設定を表示または構成します。
- 例えば、スピンフォルダには低輝度の光を15°のスイング角度で、スピンフォルダには高輝度の光を45°のスイング角度で設定することができます。
- ユーザーは、設定スコープを静止画像フォルダーまたはアイテム内の他のフォルダーに追加することもできます。
- システムは、画像のキャプチャ時に設定スコープを自動的に適用します。
すべての画像の設定範囲を表示または構成するには、[ すべてのフォルダー] をクリックします。設定範囲を構成した後、開始ボタンをクリックすると、割り当てられたプリセットでキャプチャプロセスが開始されます。
さらに、[自動的に編集]が設定されている場合、システムは写真をキャプチャし、開始ボタンをクリックした後、事前定義された 編集 操作を自動的に適用します。
( ! )- すべての編集操作とその機能の詳細については、PhotoRobotユーザーサポートマニュアル - 画像の編集を参照してください。
マクロ機能と設定
CAPP のマクロを使用すると、アイテムとそのフォルダー (スピン、静止画など) のキャプチャ プロセスのコマンドを定義できます。コマンドは、個々のフォルダーまたは複数のフォルダーに適用したり、シーケンスを実行したり、画像を編集したり、ワークスペース、プリセットを実行したり、画像設定のコピーや画像設定の移動を行ったりすることができます。ユーザーは、名前、バーコード、タグ、またはメモでマクロをさらにカスタマイズすることもできます。
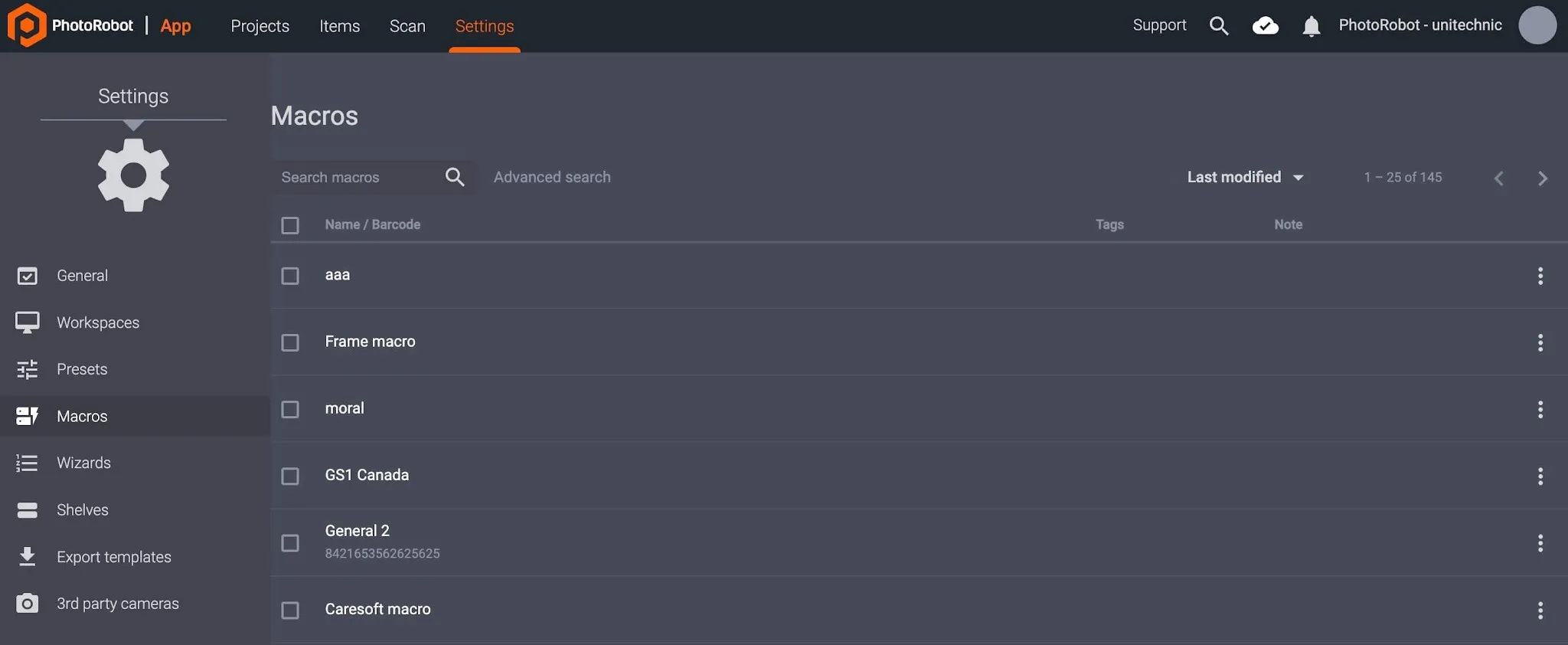
注: PhotoRobotマクロの設定と使用に関する詳細な手順については、PhotoRobotマクロユーザーガイドを参照してください。マクロが複数のフォルダーとコンポーネントで写真撮影の自動化の魔法をどのように実現し、複雑なタスクを自動処理するかをご覧ください。
PhotoRobot ウィザードモード
CAPPのウィザードモードは、手動のハードウェア、カメラ、シーケンス設定の代替として機能します。使用時には、ウィザードモードにより管理者または写真家が異なるウィザードを作成し、生産ラインオペレーターのキャプチャモードを簡素化できます。オペレーターはウィザードモードでCAPPを開始でき、これはウィザードガイド付きの手順を備えた非常にシンプルなインターフェースとして機能します。使いやすさとオンボーディングのために、制限されたコントロールもあります。
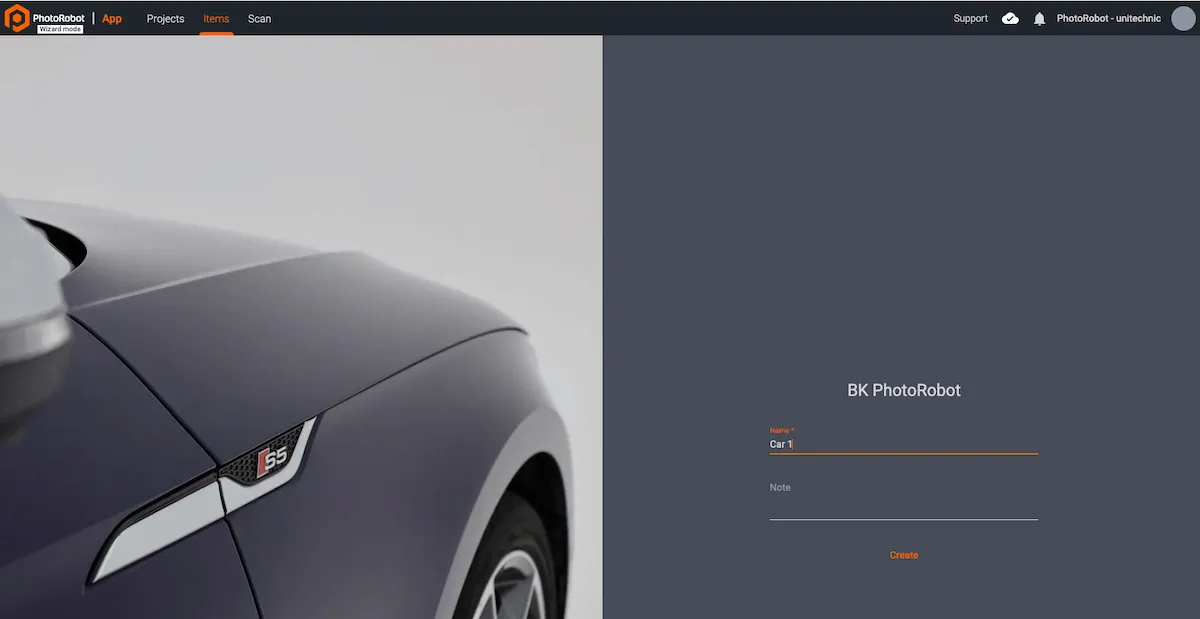
ウィザードを作成すると、プリセットとワークスペースの設定、およびオペレーターが従うべき事前定義された手順が保存されます。オペレーターは設定を調整できず、次のプロセスに進む前に各ステップの指示を完了する必要があります。
注: ウィザードのステップはJavaScriptのような言語形式で定義されており、PhotoRobotのコンサルタントによってカスタム機能のためにスクリプト化されています。ユーザーは、初期の実験や簡単なセットアップのために基本的な機能をスクリプト化することもできます。ウィザードの技術的な構成とオペレーターの使用に関するドキュメントについては、PhotoRobotウィザードモードユーザーマニュアルを参照してください。


EOS Rebel シリーズ


EOS DSLR シリーズ


EOS M ミラーレス シリーズ


PowerShotシリーズ


クローズアップ/ ハンドヘルド

Canon EOS Rebel シリーズは、安定した画質、直感的なコントロール、多彩な機能を備えた、初心者向けのデジタル一眼レフカメラを提供します。写真愛好家に最適なこれらのカメラは、信頼性の高いオートフォーカス、バリアングルタッチスクリーン、フルHDまたは4Kビデオ録画を提供します。
接続
解像度(MP)
解決
Canon EOS DSLR シリーズは、高品質の画像、高速オートフォーカス、および汎用性を提供し、写真とビデオ制作の両方に最適です。
接続
解像度(MP)
解決
キヤノンEOS Mミラーレスシリーズは、コンパクトなデザインとデジタル一眼レフのようなパフォーマンスを兼ね備えています。交換レンズ、高速オートフォーカス、高品質イメージセンサーを備えたこれらのカメラは、画質を犠牲にすることなく携帯性を求める旅行者やコンテンツ制作者に最適です。
接続
解像度(MP)
解決
キヤノンのPowerShotシリーズは、カジュアルなシューターや愛好家のためのコンパクトでユーザーフレンドリーなカメラを提供します。シンプルなポイント&シュートから高度なズームカメラまで、さまざまなモデルを取り揃えており、利便性、安定した画質、手ぶれ補正や4Kビデオなどの機能を提供します。
接続
解像度(MP)
解決
キヤノンのクローズアップ&ハンドヘルドカメラは、詳細でクローズアップした写真やビデオ用に設計されています。コンパクトで使いやすく、精密なフォーカス、高解像度のイメージング、汎用性の高いマクロ機能を備えており、Vlog、製品写真、クリエイティブなクローズアップに最適です。


