PhotoRobot Cube V5 / V6 /コンパクトユーザーマニュアル
このユーザーマニュアルには、PhotoRobot Cube V5 / V6 / Compactのインストール、接続、および使用に関する技術的な手順が記載されています。Cubeロボットを回転マネキン胴体ホルダーとして設置する方法が記載されています。このマニュアルは、デバイスの組み立て、最初の使用、および生産ラインオペレーターのオンボーディング中に、PhotoRobotのお客様をサポートすることを目的としています。

手記:PhotoRobot デバイスの最初のインストールは、常に認定された PhotoRobot 機関によって実行される必要があります。PhotoRobot のインストールを許可された当局は、承認された販売代理店、またはメーカー自体の代表者です。
重要:自己インストールまたは初めて使用する前に、必ず最初にデバイスに付属のマニュアルに加えて、PhotoRobotの安全情報と手順を参照してください。
キューブ V5 / V6 / コンパクト 初回使用と設置
PhotoRobot Cube の購入に感謝し、おめでとうございます。あなたのデバイスは、自動写真における数十年にわたる専門的な経験、ノウハウ、革新性を表しています。すべてのロボットの設計は、お客様を念頭に置いています。一方、ソフトウェアは常に開発されており、独自のニーズに合わせて調整され、アップデートのたびに PhotoRobot エコシステム全体に利益をもたらします。
PhotoRobotへようこそ。Cube V5 / V6 / Compact PhotoRobotsに関するこの技術ドキュメントを使用して、テクノロジーに慣れ、ソリューションの組み立てと最初の使用の詳細を説明する手順を確認してください。
1.製品説明-キューブV5 / V6 /コンパクト
PhotoRobot Cube V5 / V6 / コンパクトデバイスは、最も用途の広いフォトスタジオロボットの1つです。各キューブは、スタンドアロンで、または他のPhotoRobotと組み合わせて機能することができ、3つの異なる動作モードの構成を備えています。Cubeは、回転する写真プラットフォーム、オブジェクトサスペンションモード、および回転するマネキンの胴体ホルダーとして機能します。

PhotoRobot Cube の主な機能は次のとおりです。
- スタンドアロンで使用するか、互換性のあるPhotoRobotと組み合わせて使用中
- 360ターンテーブル、またはオブジェクトサスペンションモードでのクイックセットアップ
- マネキン胴体ホルダーまたは回転プラットフォームのサポート
- さまざまなタイプやサイズの写真用マネキンに対応
- 汎用性を高めるためのCube V5、V6、およびCompactバージョンで利用可能
1.1. デバイス概要 - キューブV5 / V6 / コンパクト
PhotoRobot の Cube V5、Cube V6、 Cube Compact は 3 つの異なる構成で動作します。標準構成では、デバイスを回転する写真プラットフォームとして使用したり、写真を撮るために物体を空中に吊り下げたりします。あるいは、マネキンの胴体を取り付けるための回転スタンドとして装置をセットアップすることも可能です。
a) 360 度写真/ロータリー プラットフォームのセットアップ:

b) 360 / ロータリーサスペンションモード:

c) 回転マネキン胴体ホルダー:

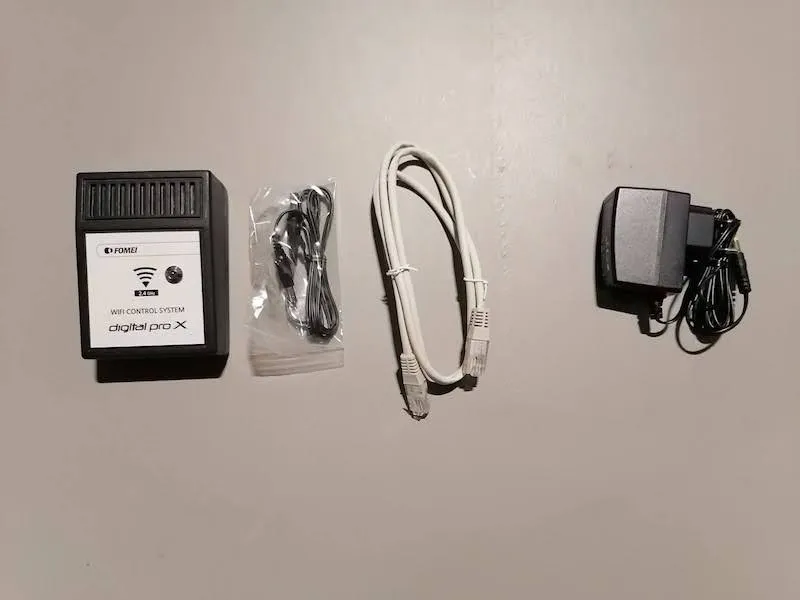
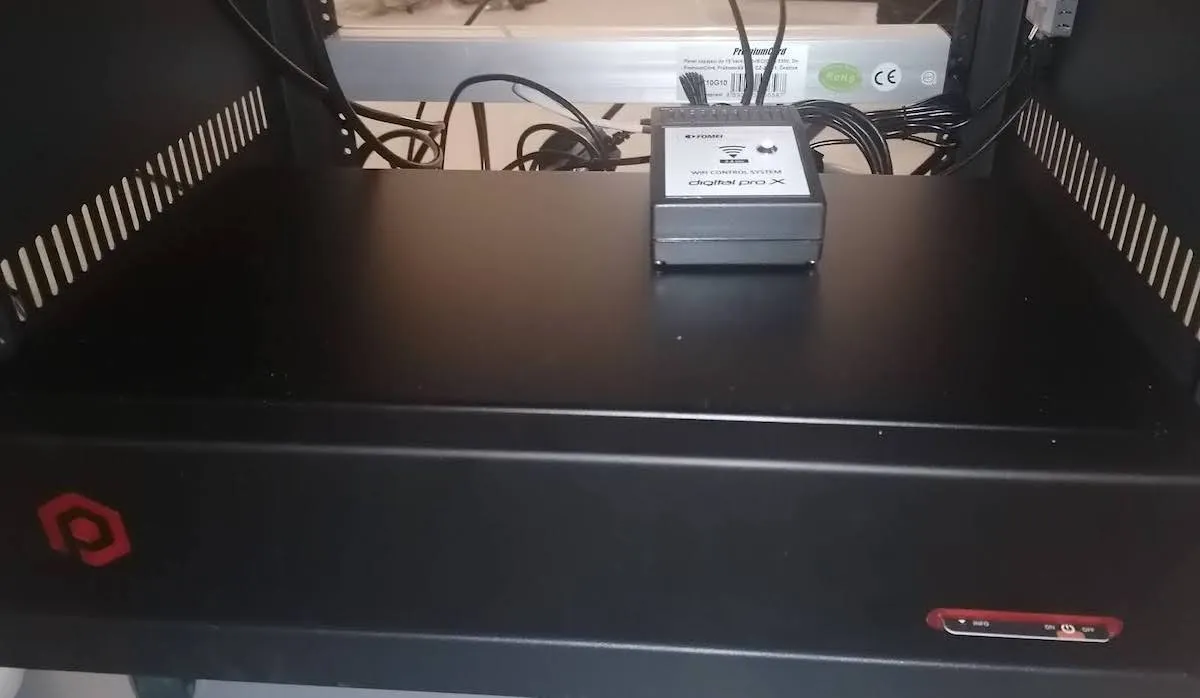
手記: Cube V5 と Cube V6 のコントロール ユニットは、デバイスとは別ですが不可欠なコンポーネントです。キューブコンパクトは、機械内にコントロールユニットを内蔵しています。
- 上の画像は、Cube V5 / Cube V6のコントロールユニットを示しています。
1.2. キューブコンパクトの技術パラメータ
Cube Compactには、以下の技術パラメータがあります。
- 重さ: 26.21 kg
- 寸法: 337.5 x 373.5 x 209.5 mm
- 電源: 100 - 230 V、50 HZ、ヒューズT1.6 A(230 V)、T3.15 A(115 V)
- 耐荷重: 下部と上部の両方の取り付けで130 kg
- 出力軸トルク: 143.5 Nm
- スピード: 0 -17 1.min-1
1.3. キューブコンパクトアクセサリー
キューブコンパクトには、以下の部品と付属品があります。
a) ハンガー:

b) ボトムベース:

c)トップベース:
d)機械の足:

e)プレート:

f) ポータル:

1.4. Cube Compactのインストールと使用の概要
Cube Compactのアクセサリに加えて、Cube Compactの設置と使用には複数の構成があります。これには、次の構成部品とセットアップが含まれます。
a) 底部固定プレート (デバイスのターンテーブルまたは取り付けシステムを固定するため):
b) 固定されたスタンドアロン回転プラットフォーム (安定性 を高めるために床に固定):


手記: この構成では、安定した床面にベースが取り付けられた95cmのプレートがあります。これにより、使用中に機械が安定し、転倒を防ぐ機能があります。そのユースケースには、最大サイズ60〜65cmまでの小型および中型のオブジェクトの提示が含まれます。
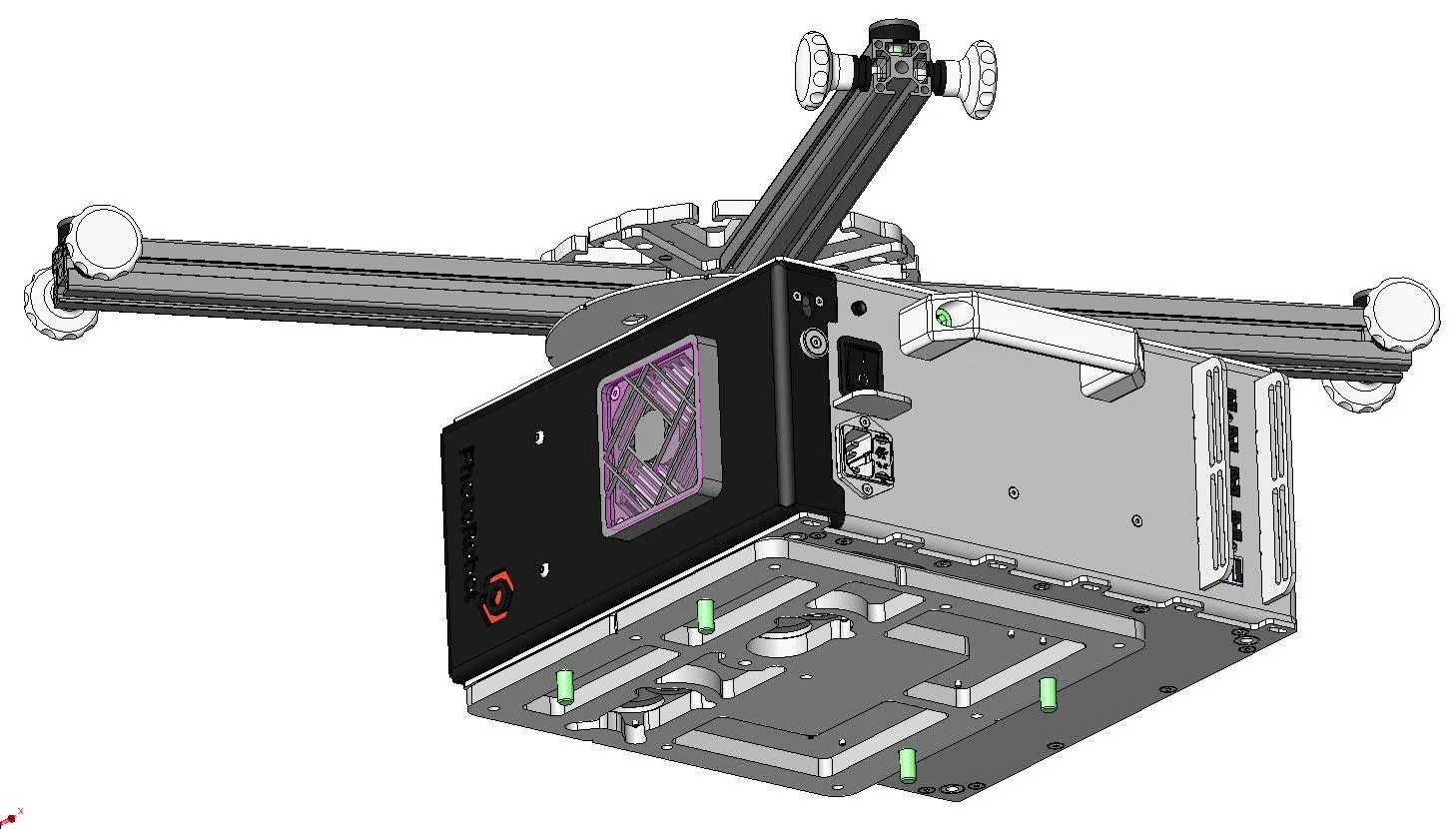
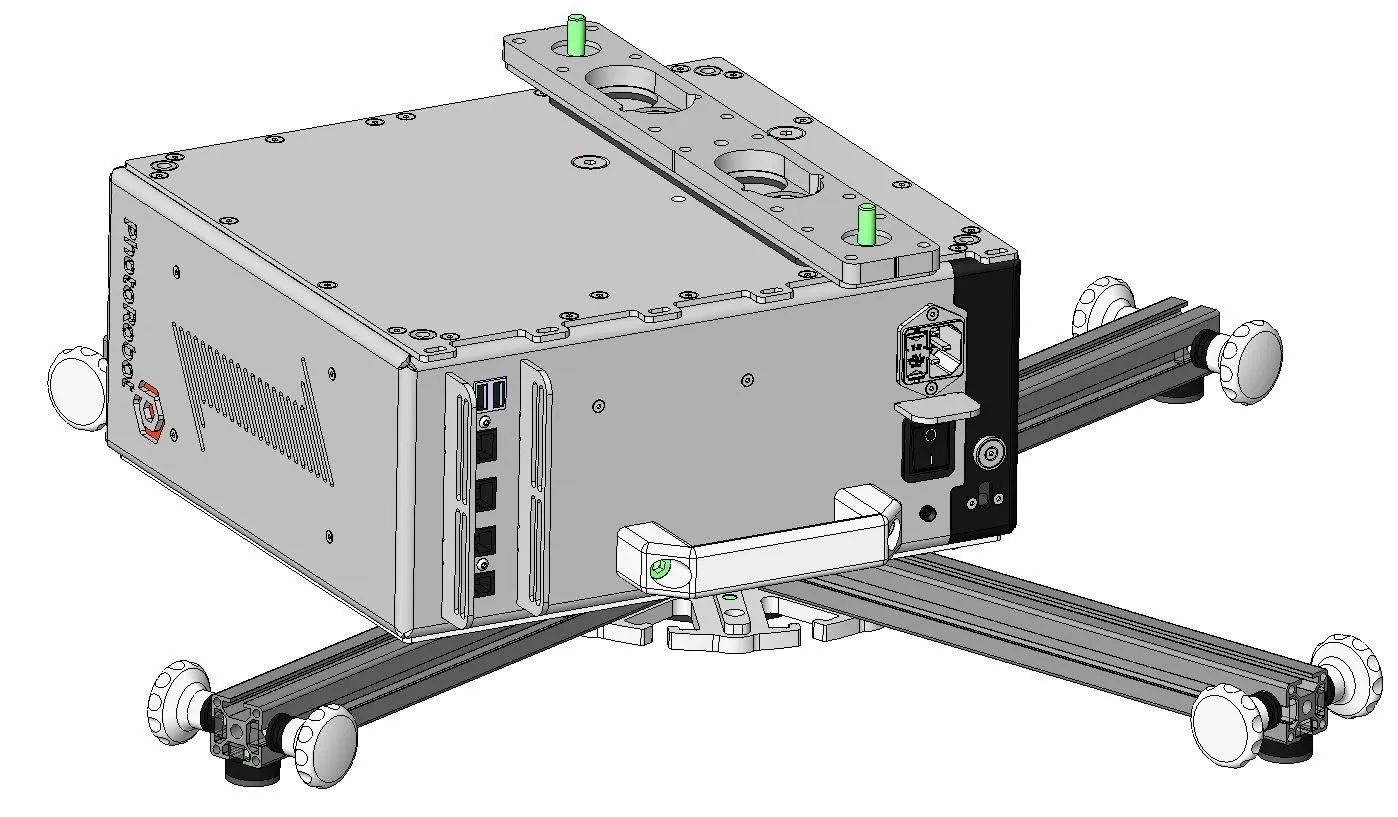
c) 自立型回転プラットフォーム (デバイス脚使用中):
d)360回転サスペンションモード (上部ポータルに逆さまに取り付ける):




1.5. キューブコンパクト緊急停止
緊急停止を実行するには、ソケットから電源コードを引っ張って、デバイスを電気ネットワークから切り離します。
1.6. キューブV5 / V6 /コンパクトメンテナンス
デバイスを清潔に保ち、温度を一定に保つ乾燥した温度管理された環境に置く必要があることに注意してください。広告でのみほこりを取り除いてくださいamp 布、洗浄には化学薬品や溶剤を使用しないでください。
設計上、機器は現地の法律に従って定期的な検査と改訂を受ける必要があります。ライフサイクルの終了後、電気機器は、地域の法律で定められた電子廃棄物収集システムに引き渡すことにより、適切に廃棄する必要があります。
2. 初回使用 - PhotoRobot Cube V5 / V6 / コンパクト
PhotoRobot を初めて使用する前に、テクノロジーの背後にある概念を理解する必要があります。PhotoRobotは、製品とオブジェクトの写真を自動化するための革新的なオールインワンソリューションです。技術的な観点からは、ハードウェアとソフトウェアで構成されるモジュラーユニットです。そのため、PhotoRobot自体は、それを操作するコンピュータと同じネットワークで接続する必要があります。また、クラウドで実行される PhotoRobot サービスにアクセスするには、ネットワークがインターネットに接続されている必要があります。次に、常に満たさなければならない次の要件があります。
- ローカルネットワークに接続されたPhotoRobotコントロールユニットが必要です。
- サービスGUIや_Controlsと呼ばれるオペレーターのソフトウェアを実行するには、コンピューターが必要です。
- コンピューターは、PhotoRobotコントロールユニットと同じネットワークに接続されている必要があります。
- ネットワークがインターネットに接続されている必要があります。
PhotoRobotがコンピューターおよびローカルネットワークに接続されていることを確認した後、配電システムのパラメータ(電圧や周波数など)を確認します。
次に、コントロールユニットの電源設定を確認します。すべての配電システムパラメータに準拠する必要があります。コントロールユニットのセットアップが準拠しない場合は、コントロールユニットの電源セットアップに関する次のセクションを参照してください。
準拠している場合は、イーサネットケーブルを介してコントロールユニットをネットワークに接続して続行します。
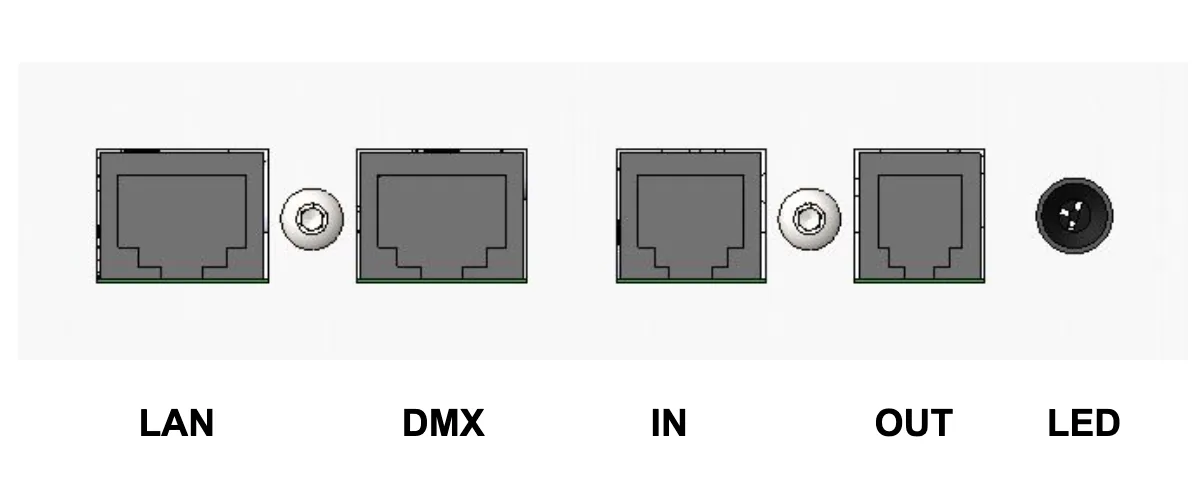
手記:Cube V5 / V6モデルの場合、コントロールユニットは別のデバイスです。コントロールユニットの背面にあるRJ45コネクタを見つけます。キューブコンパクトには、コントロールユニットが機械に組み込まれています。キューブロボットの背面にあるRJ45コネクタを見つけます。
2.1. コントロールユニットの電源設定
コントロールユニットの電源設定を確認するために、古いモデルのコントロールユニットには手動ボリュームがありますtageデバイスの背面にセレクター。

あるいは、新しいモデルのコントロールユニットには電圧セレクターがなく、110V〜240Vの動作範囲があります。
コントロールユニットの電源設定が不明な場合は、PhotoRobot テクニカル サポートに連絡して、専門の PhotoRobot 技術者のサポートを受けてください。
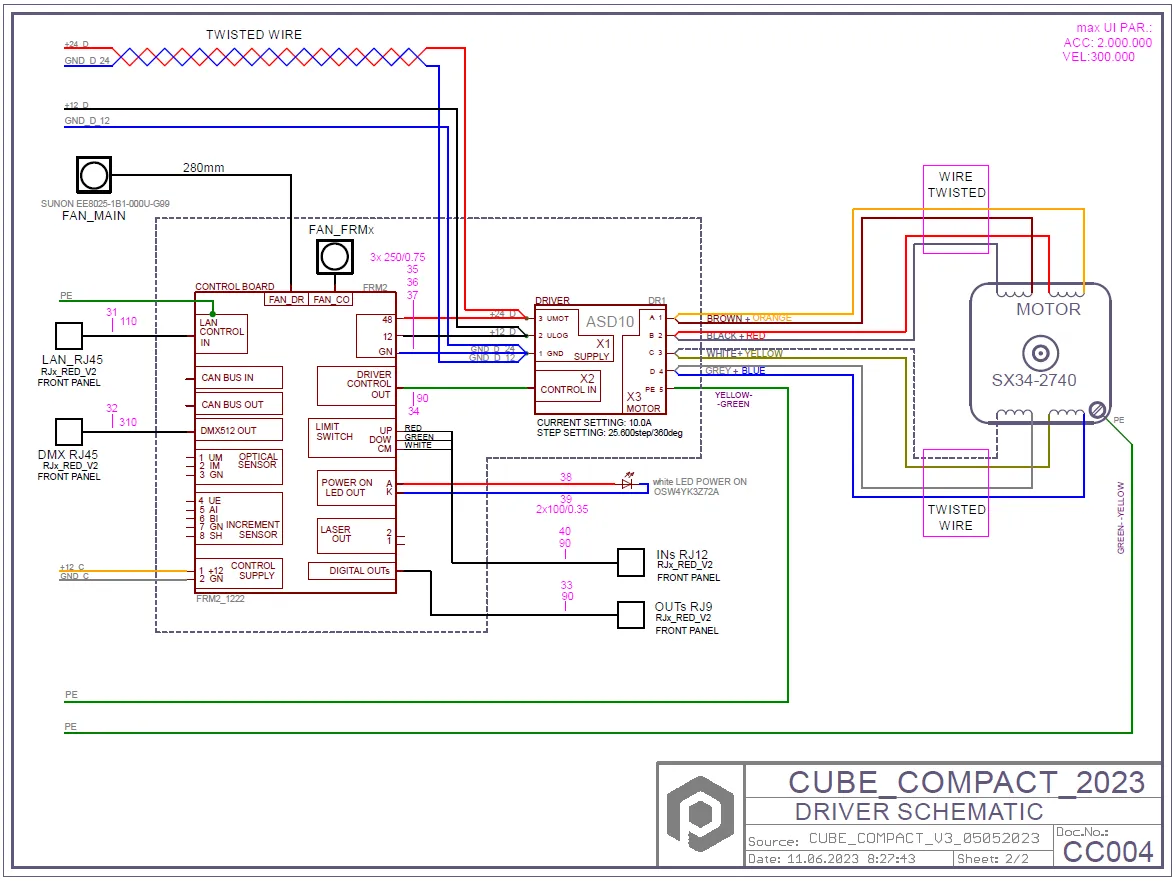
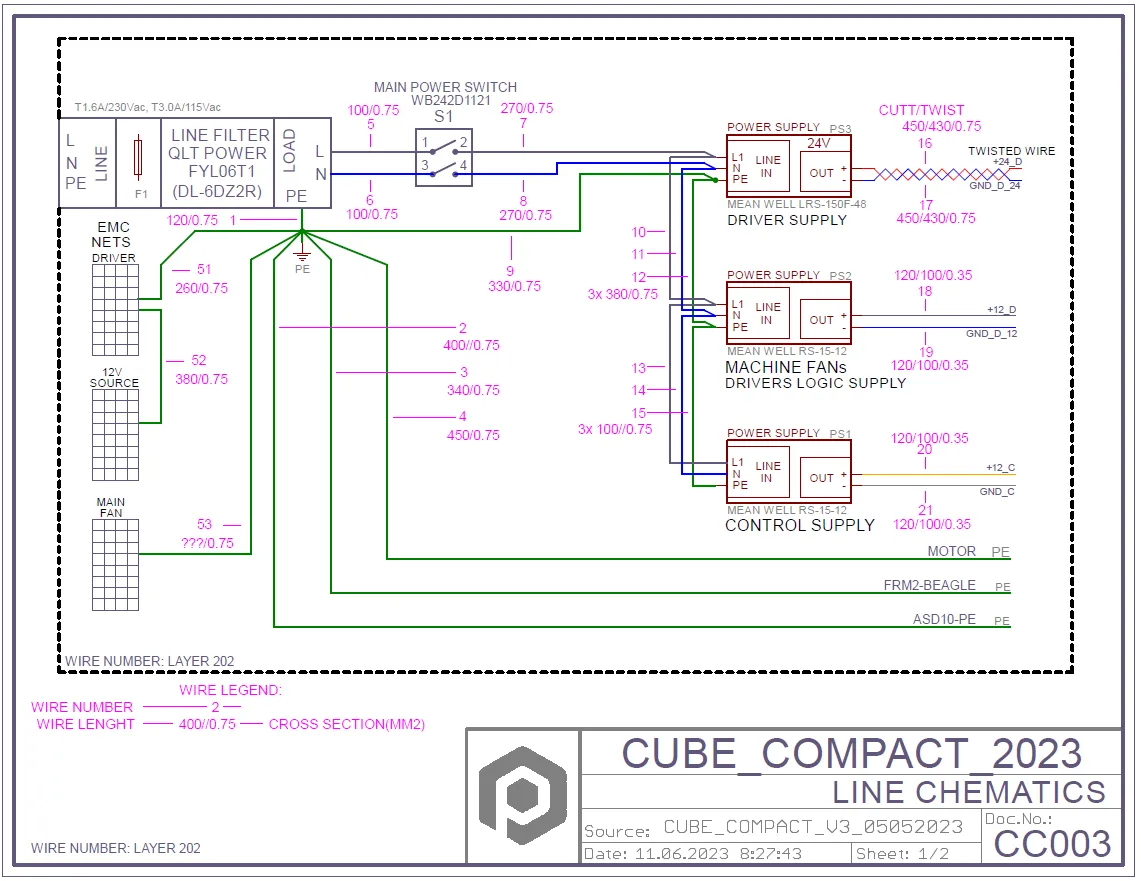
2.2. キューブコンパクト電気回路図
2.3. ネットワーク設定
PhotoRobotと正しく通信するようにネットワークを設定するには、ネットワーク上で次の要件を満たす必要があります。
- ネットワーク内の DHCP サーバーは必須です。
- TCPポート7777、7778通信を許可する必要があります。
- ポート 6666 での UDP ブロードキャストを許可する必要があります
- インターネット接続は必須です。
- *.photorobot.com アクセスを許可する必要があります。
- as-unirobot.azurewebsites.net アクセスを許可する必要があります。
- PhotoRobotのLANへの有線接続を推奨します。
- 詳細については、PhotoRobot の詳細なネットワークの前提条件を参照してください。
- 電源プラグを電源ソケットに接続します。
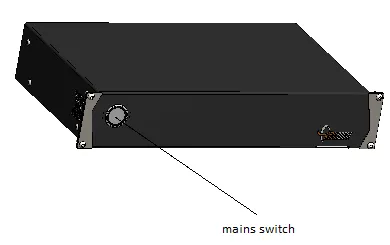
次に、Cube V5 / V6のコントロールユニット(またはCube Compactの背面)の主電源スイッチを押します。ステータスライトは、動作の準備ができると、点滅から連続ライトに変わり、信号を合図します。
2.4. LANでPhotoRobotのIPアドレスを見つける
ネットワークの適切な設定後、LAN上でPhotoRobotのIPアドレスを検索し、特定する必要があります。これを行うために、ネットワーク上のコントロールユニットをより簡単に検索および特定できるように、PhotoRobot LocatorアプリがCAPPに直接統合されています。この機能にアクセスするには、最新バージョンのCAPPを使用していることを確認してください。
次に、CAPP内でネットワーク上のロボットを直接識別するには、CAPPのローカルバージョンを開き、設定に移動して、ロボット / 制御ユニットをクリックします。

ロボット/コントロールユニットメニューには、各ロボットの名前、ネットワーク、ユニット、バージョン、検出済み、識別という列が表示されます。ロボット名の左にある点が緑色の場合、オンライン状態です。ロボットフィールドをクリックすると、ロボットのウェブサイトインターフェースが開きます。これにより、ロボットのコントロールユニットのLEDライトが緑色に点滅し、識別が容易になります。
お客様がアプリの外部ダウンロードを必要とする場合、PhotoRobot LocatorはPhotoRobot Account Downloads内でiOSダウンロードも可能です。

注: PhotoRobot LocatorのAndroid版は廃止されました。
あるいは、ネットワークを検索して PhotoRobot コントロールユニットを識別するための MacOS または Windows 用の FRFind コマンドラインユーティリティがあります。FRFind のダウンロードリンクは PhotoRobot アカウントのダウンロードページにもあります。
2.5. 基本テスト - Cube V5 / V6 / Compact
Cube V5 / V6 / Compactをテストするには、次にWebブラウザを開き、PhotoRobotに関連付けられたIPアドレスをURL形式で入力します。たとえば、「https://11.22.33.44」と入力します(ただし、このアドレスは単なる例であることに注意してください)。成功すると、基本的なユーザーインターフェイスが起動します。

- エンジンをオンにし(上の矢印1)、ロボットの可動部分を操作してみてください(上の矢印2)。ロボットが指示に従って動いたら、PhotoRobotデバイスを定期的に使用する準備が整います。
3. キューブ V5 / V6 アセンブリとマネキン トルソー ホルダー
Cube V5またはCube V6モデルを組み立てる場合は、コントロールユニットとラックを別々に組み立てる必要があります。これは、キューブコンパクトには当てはまりません。Cube Compactをお使いの場合は、紙の背景の組み立てに進んでください。
3.1. HDラックとコントロールユニット(V5 / V6)の組み立て
3.1.1. Cube V5 と Cube V6 の別々のコントロールユニットを組み立てるには、ラックの組み立てから始めます。このためには、箱に添付されているマニュアルの指示に従ってください ラック 納品時。

3.1.2. 次に、コントロールユニットを見つけて、カートン輸送箱から開梱します。

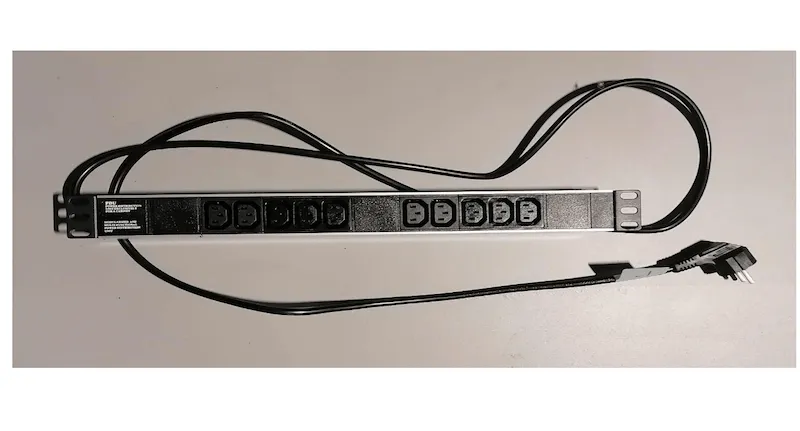
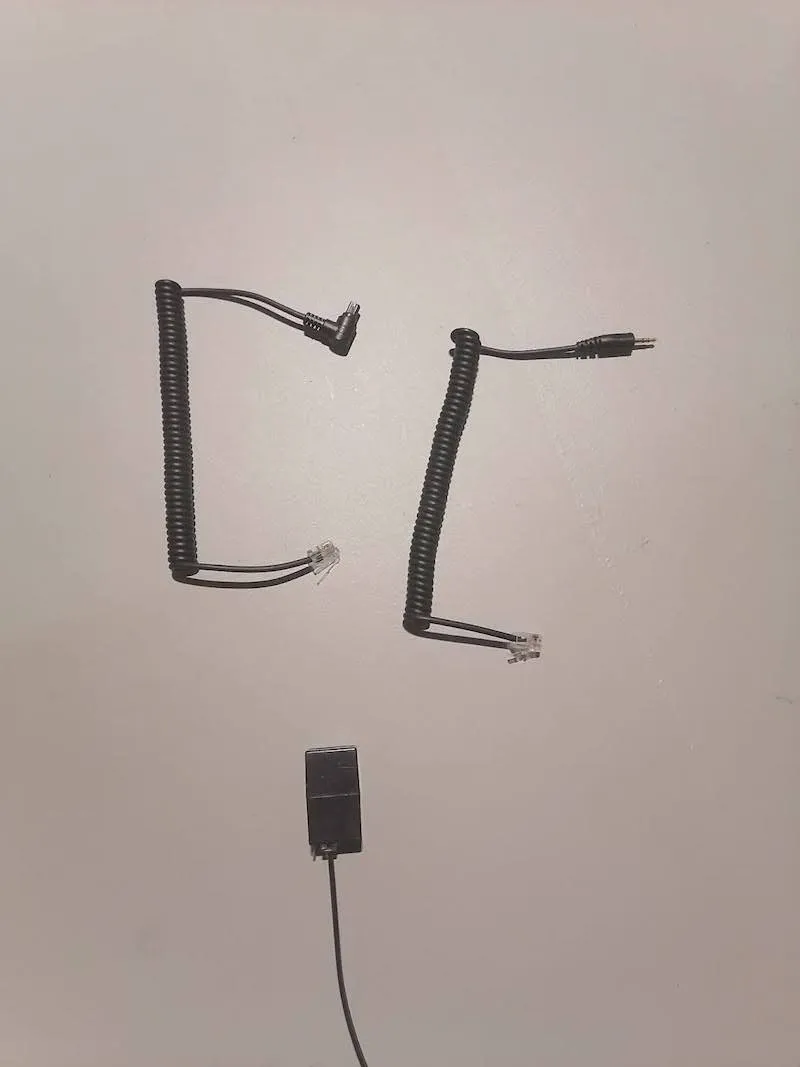
3.1.3. 次に、 電源ケーブル (長さ 1 メートル)、 シャッター ケーブル、 モーター ケーブル、 イーサネット ケーブル (長さ 2 メートル) のケーブルを準備します。
a) 電源ケーブル (長さ 1 メートル):

b) シャッターケーブル (長さ 1 メートル):

c) モーターケーブル:

d) イーサネット ケーブル (長さ 2 メートル):
3.1.4. 前の手順で準備した各ケーブルをラックに配置します。
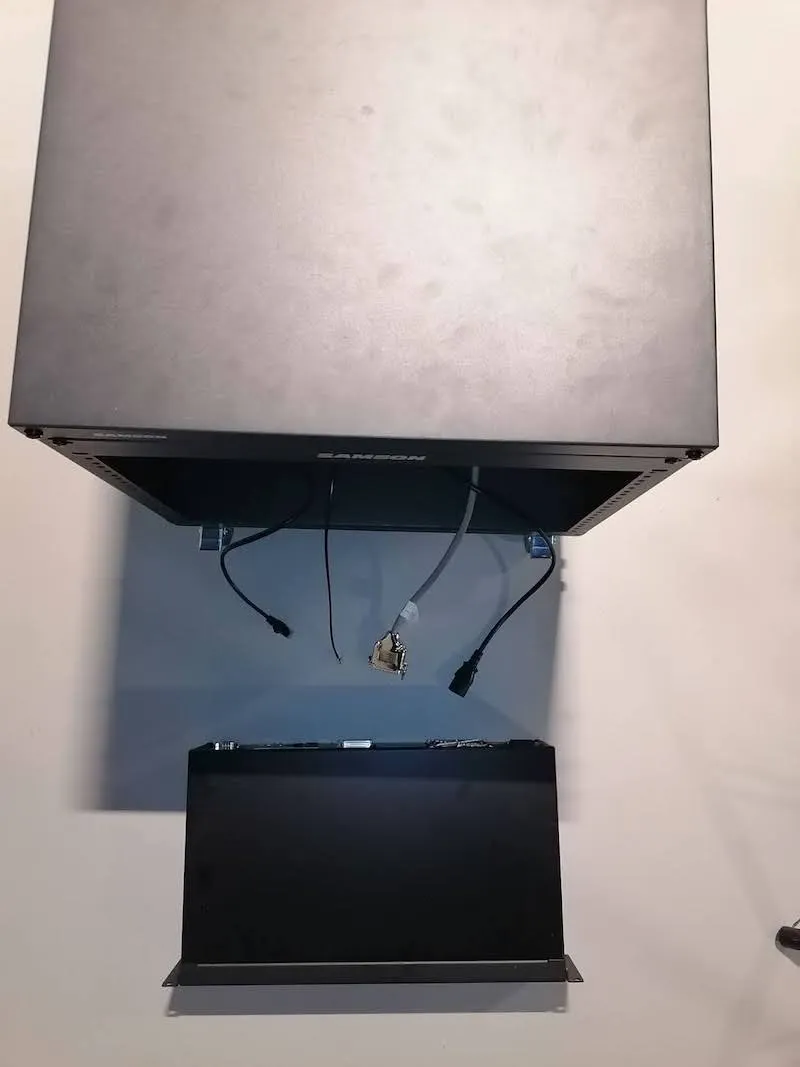
3.1.5. 前の手順のケーブルをコントロールユニットに接続します。

大事な: モーターケーブルは、コネクタの2本のネジを使用してしっかりと固定する必要があります。シャッターケーブルは、コントロールユニットのOUTポートに接続します。
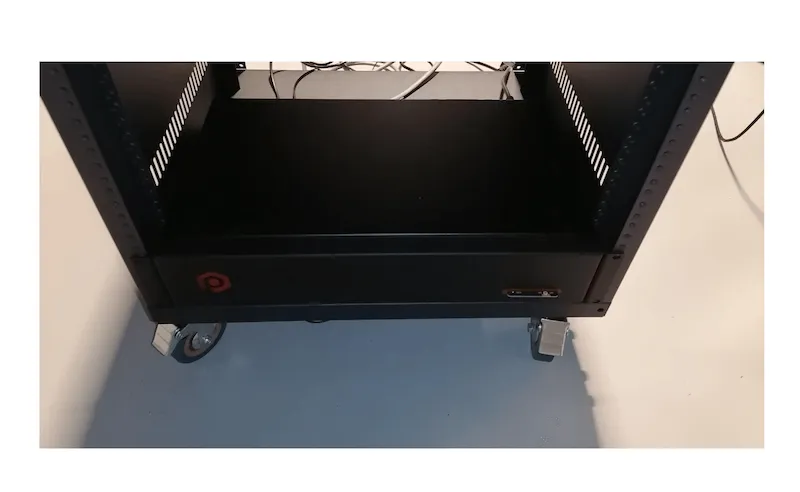
3.1.6. コントロール・ユニットをラック・ケースに挿入し、ネジを締めて密閉します。
3.2. アクセサリと接続の組み立て
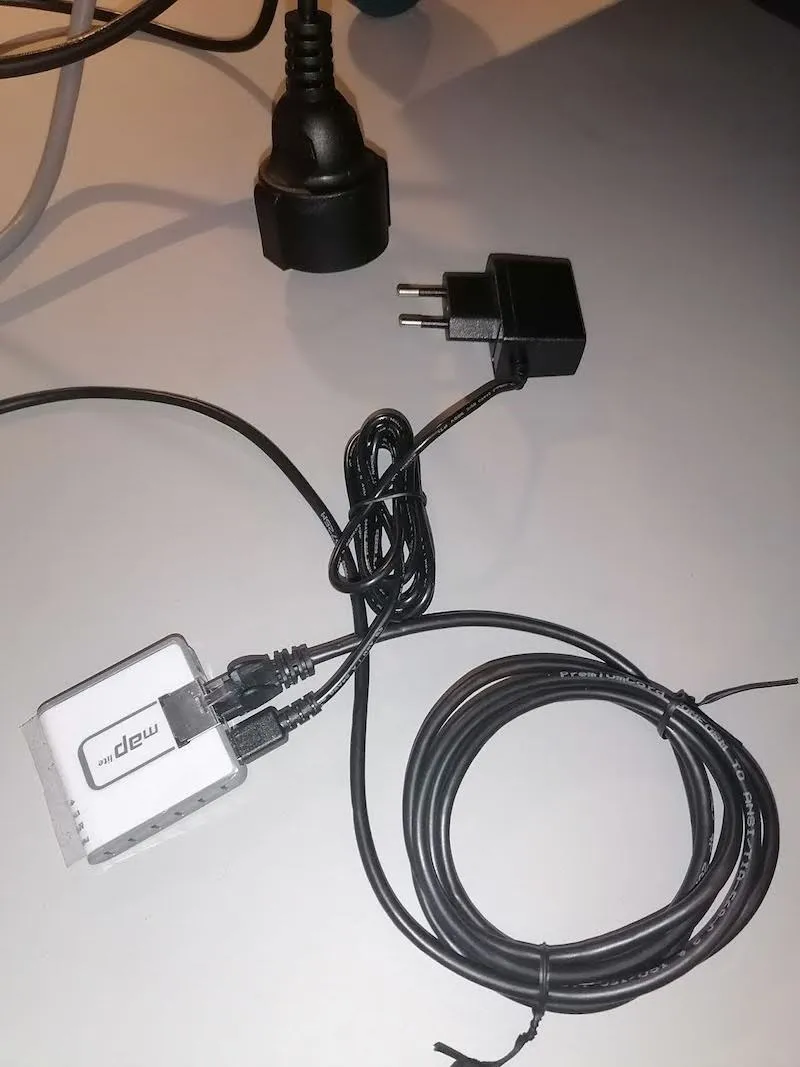
3.2.1. Cube V5 / Cube V6 のすべてのアクセサリを接続するには、まずカートン ボックスからルーターを開梱し、ラック ホルダーを取り付けます。次に、電源ケーブルまたはアダプタ(ルータのタイプによって異なります)を接続し、ルータをラックケースに挿入してからネジで閉じます。

3.2.2. 電源マルチソケットをラック背面の下部にネジで固定し、固定します。

3.2.3. 納品されたルーターに電源アダプターがある場合は、電源アダプターのインターフェイスを見つけて、電源マルチソケットコネクターに差し込みます。


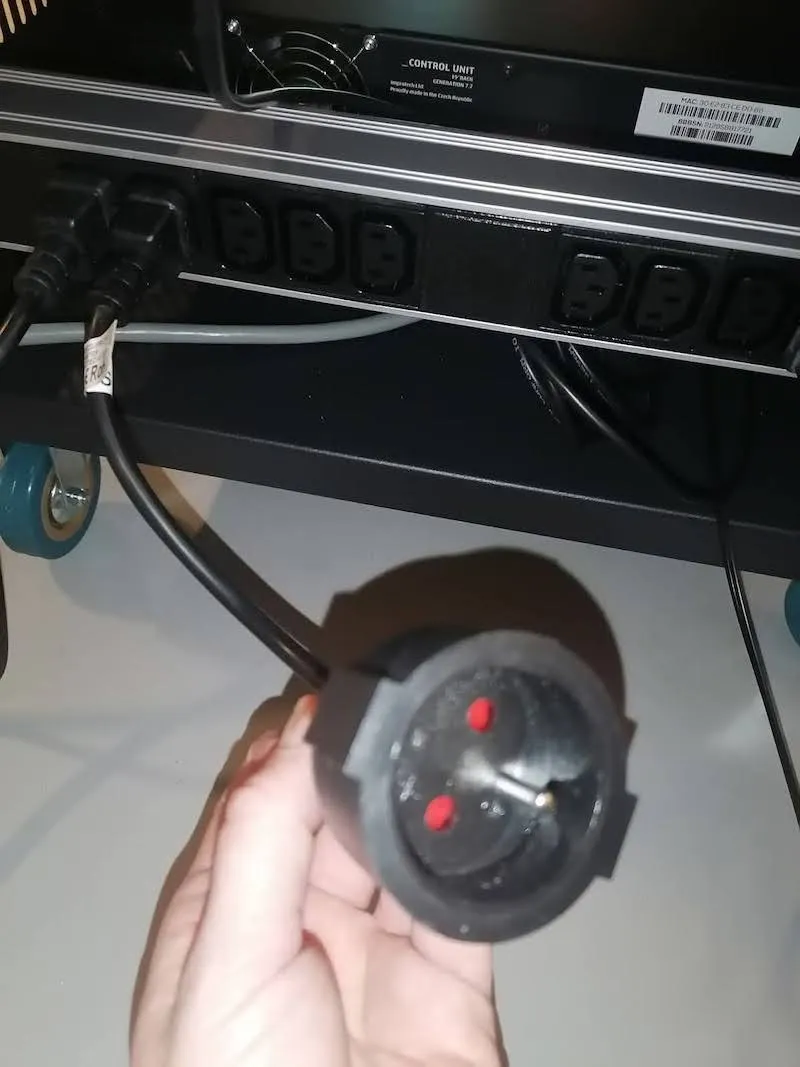

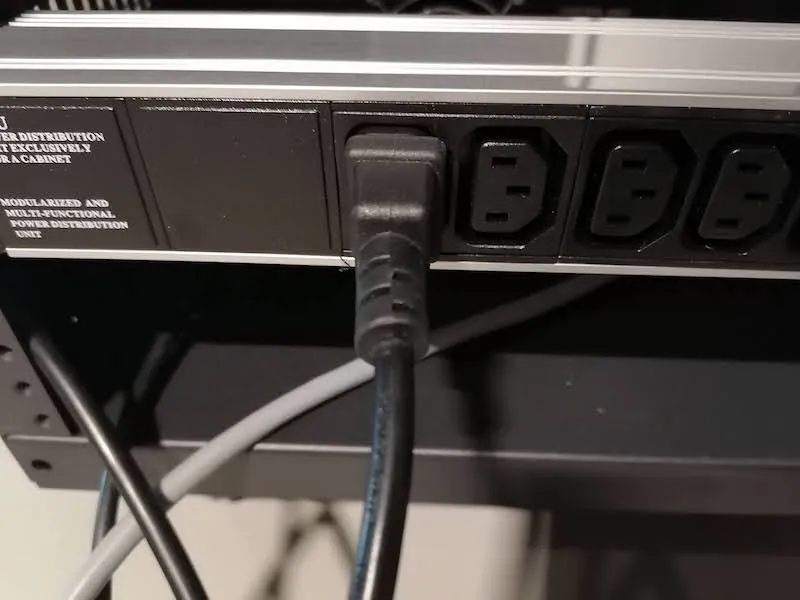
3.2.4. コントロールユニットの電源ケーブルの自由端を見つけて、電源マルチソケットに接続します。
3.2.5. 最長のイーサネットケーブルを使用して、ケーブルをスタジオのデータウォールソケットに差し込みます。デフォルトでは、このデータウォールソケットを介してインターネットアクセスが利用可能になることが予想されるため、IPアドレスが自動的に取得されることに注意してください。


3.2.6. イーサネットケーブルのもう一方の端をルーターの最後のポートに差し込みます。ルーターのタイプに応じて、ポート番号 10 またはポート番号 13 のいずれかを使用します。
3.2.7. 次に、任意のポート番号 1 から 9 を使用して、コントロール ユニットからルーターにイーサネット ケーブルの自由端を差し込みます。
3.2.8. 電源アダプターのインターフェースを見つけて、電源マルチソケットに差し込みます。
3.2.9. カートンボックスからWi-Fiモジュールを開梱し、Wi-Fiモジュールに接続する別の2メートルのイーサネットケーブルを見つけます。イーサネット ケーブルのもう一方の端は、任意のポート番号 1 から 9 を使用してルータに接続します。



3.2.10. 次に、Fomei ストロボを使用している場合は、Fomei Wi-Fi コンバーターと電源アダプターを開梱し、デバイスを接続します。Broncolor ライトを使用する場合は、PhotoRobot - Broncolor ライト管理を参照してください。

3.2.11. 電源アダプターのインターフェースを電源マルチソケットに差し込み、アダプターを差し込みます。ケーブルのもう一方の端は、任意のポート番号 1 から 9 を使用してルータに接続します。

3.2.12. 電源マルチソケットプラグを壁のコンセントに接続します。

3.2.13. お使いのカメラモデルにシャッターケーブルターミネーターのバリアントパスを見つけて、シャッターケーブルカプラーに差し込みます。


3.3. 紙の背景の組み立て
3.3.1. 紙の背景を組み立てるには、まず Master LS 13-B ライト スタンドを 2 つ見つけます。次に、エキスパンダースタッドセット用のW-2固定フォークを各スタンドの上に取り付けます。



3.3.2. スタッドをセットした紙の背景を 2 つの三脚の固定フォークに置きます。1 つは背景の左側を保持し、もう 1 つは背景の右側を保持します。

3.3.3. 次に、 スタッドセットの取り付けの画面録画を見て、ビデオの手順を繰り返します。

3.4. キューブV5/V6ロボットの組み立て
3.4.1. 回転するマネキン胴体ホルダーをサポートするように Cube ロボットを構成するには、まずロボットを開梱し、その 4 本の脚をデバイスの底部に取り付けます。


3.4.2. 次に、モーター ケーブルのもう一方の端を Cube に接続し、両方のネジをコネクタに固定します。


3.4.3. 機器を接続した後、キューブロボットを白い背景の中央の地面に置きます。キューブを用紙から1メートル離して配置します。
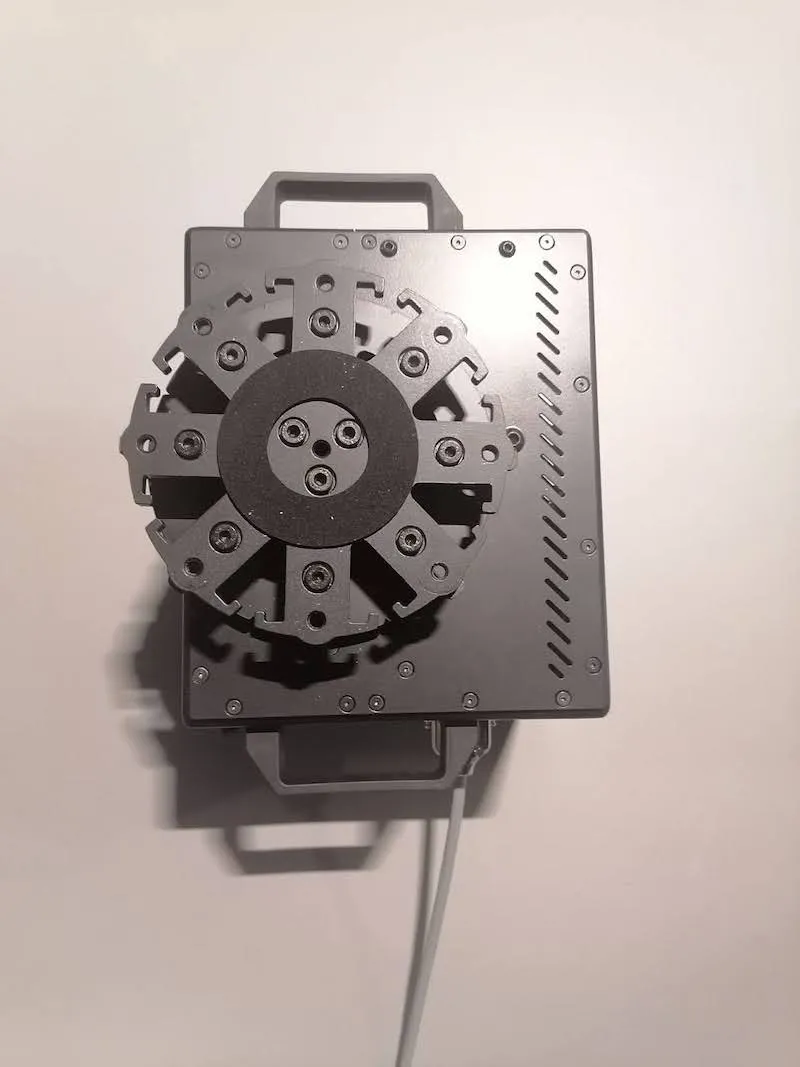

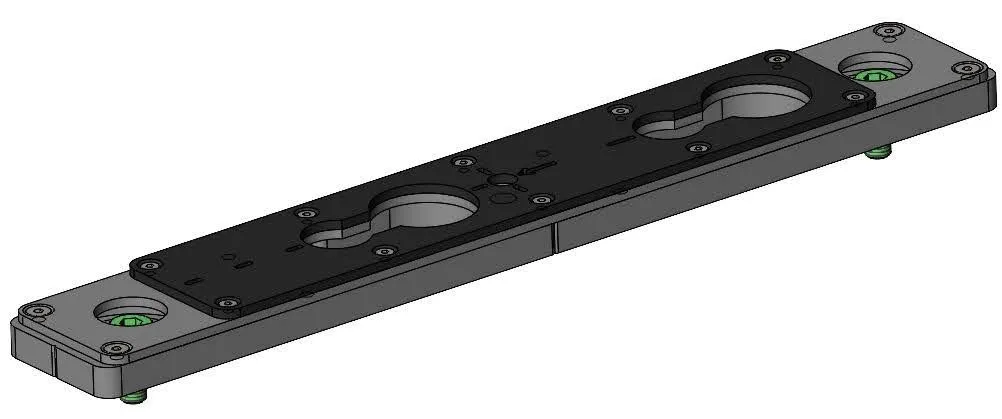
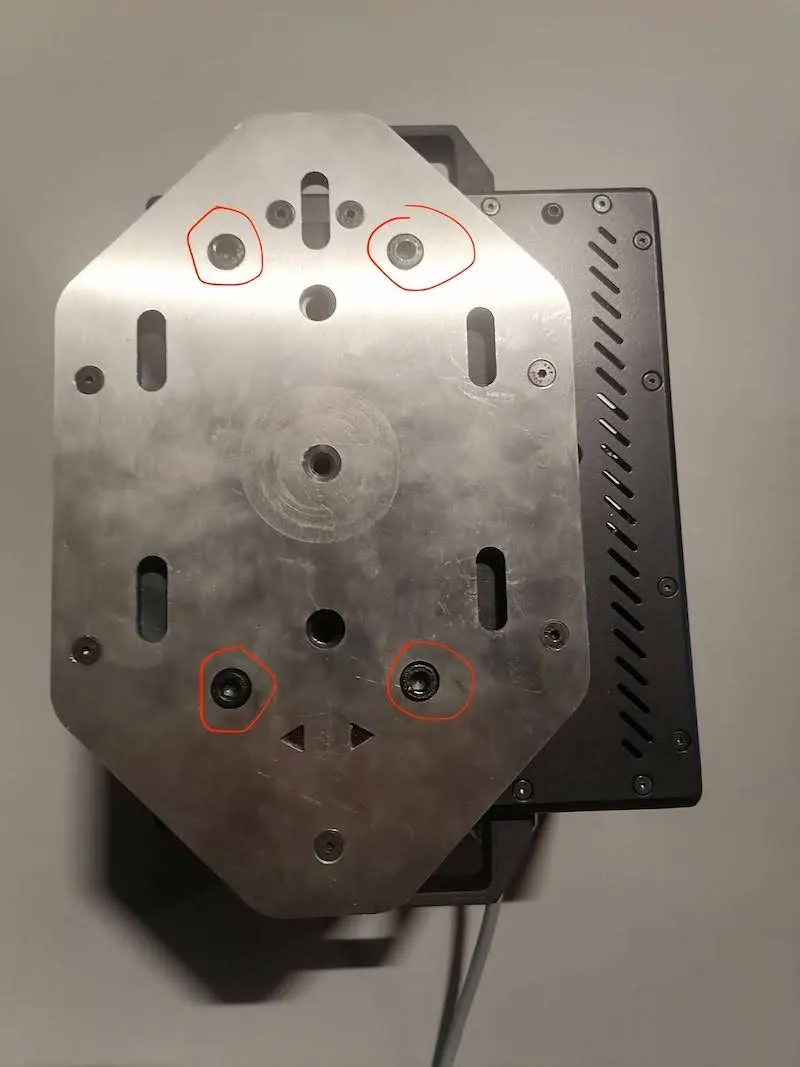
3.4.4. 胴体ホルダーのリダクションプレートをキューブロボットの上部に置き、付属の4本のネジで所定の位置に固定します。
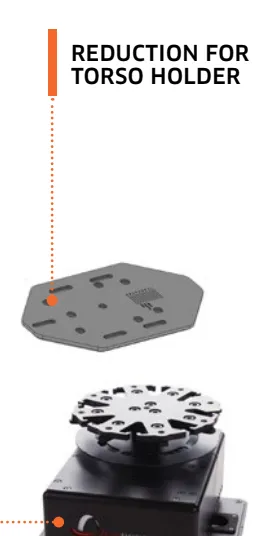
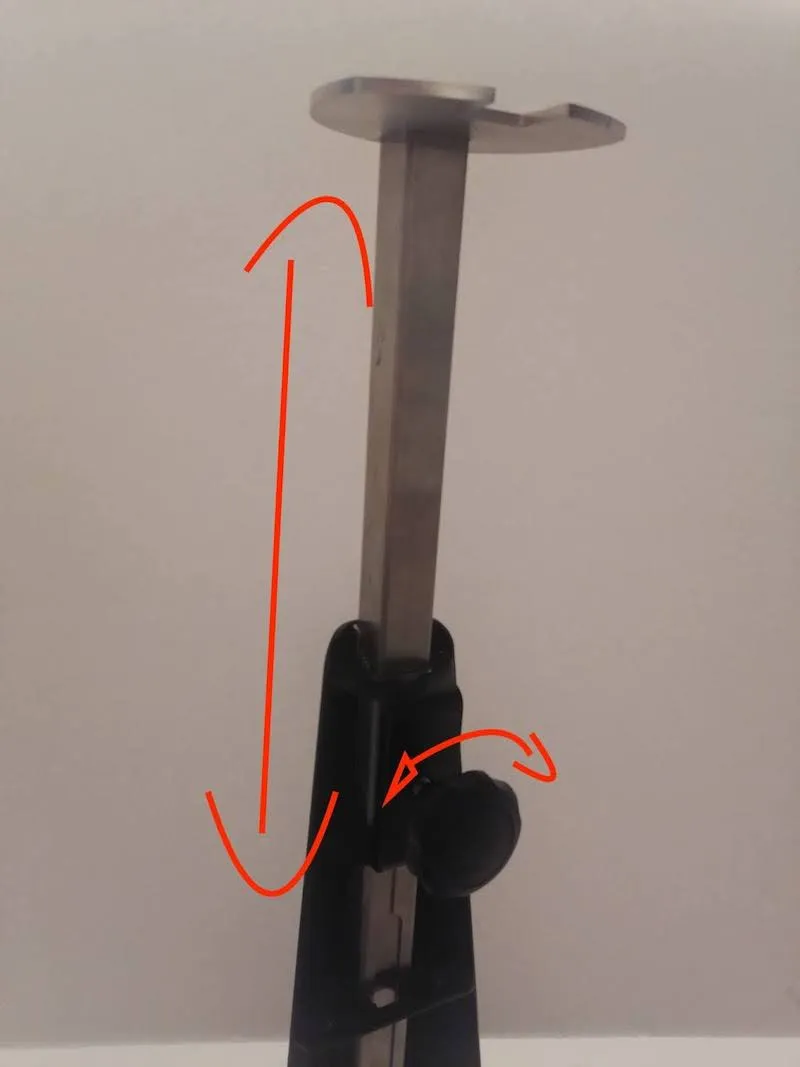
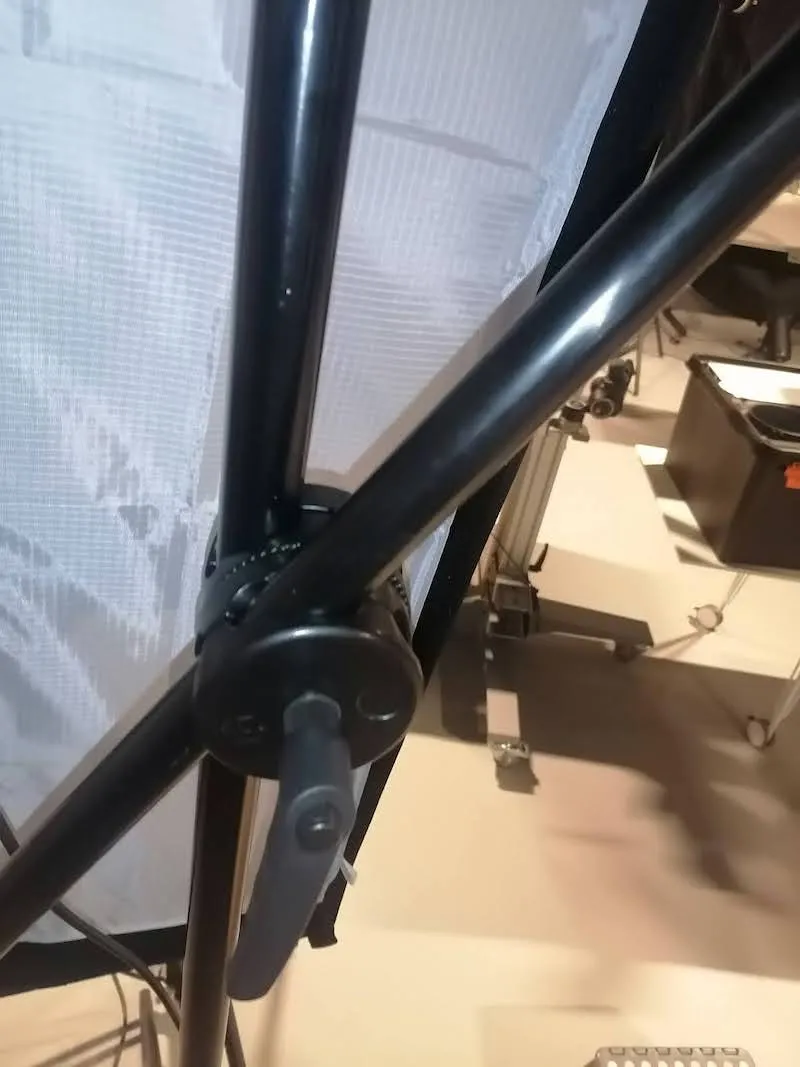
3.4.5. 胴体ホルダーの本体をリダクションプレートに配置し、大きな手ネジを使用して胴体ホルダーを所定の位置に固定します。


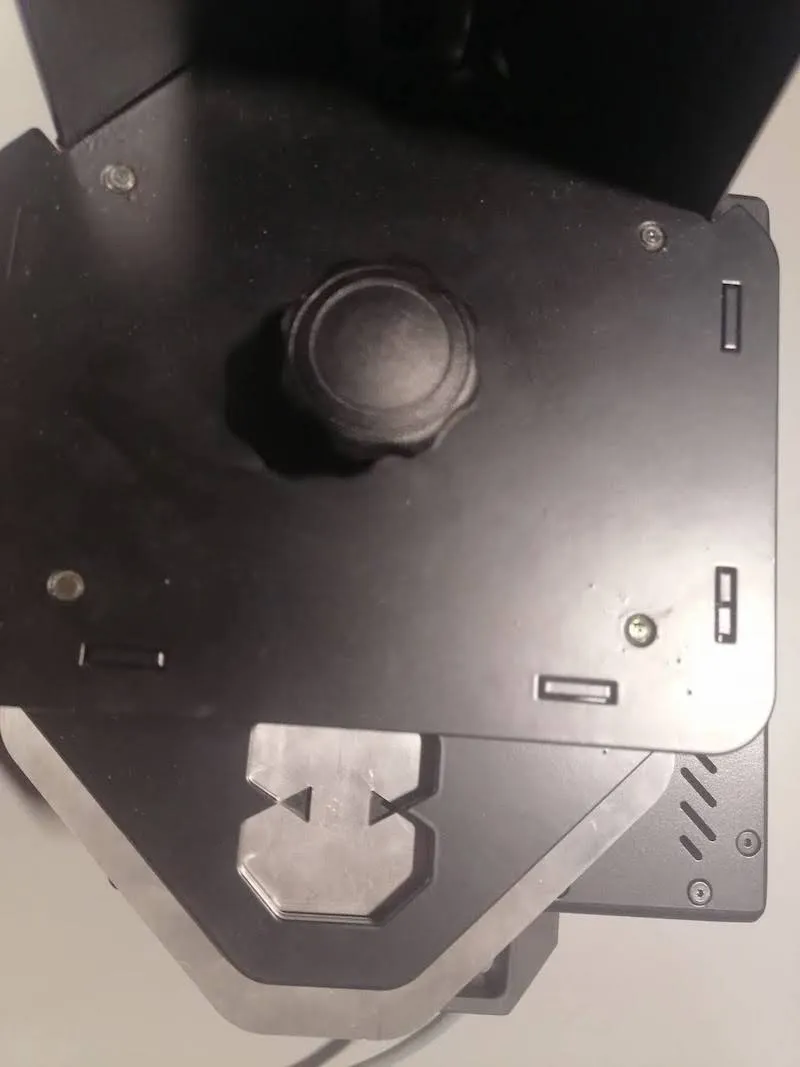
大事な: このステップには細心の注意を払う必要があります。リダクションプレートの三角形の記号が胴体ホルダーを通して見えることを確認します。これは、胴体ホルダーが正しく取り付けられていることを意味します。
3.4.6. この時点で、胴体の高さは、手ネジを緩めたり締めたり、エクステンションを上下にスライドさせたりすることで調整できることに注意してください。
3.5. フラッシュライトのセットアップ
3.5.1. キューブロボットでフラッシュライトをセットアップするには、まずボックスからフラッシュライトを開梱し、次にパイロットバルブを各フラッシュライトに挿入します。


手記: パイロットバルブを挿入するには、ガラスをメインから慎重に緩めます。次に、カートンボックスからパイロットバルブを取り出す前に、メイン電球からガラスプロテクターについても同じことを行います。パイロットバルブを取り扱うときは、必ずナプキンまたは布を使用してください。次に、パイロットバルブを次の写真のような正確な位置で接続部に挿入します。




準備ができたら、ガラスプロテクターを元に戻し、前の手順を繰り返して各ライトを組み立てます。

3.5.2. パイロット電球をセットアップし、ガラスプロテクターを交換した後、電源ケーブルをすべてのフラッシュライトに接続します。


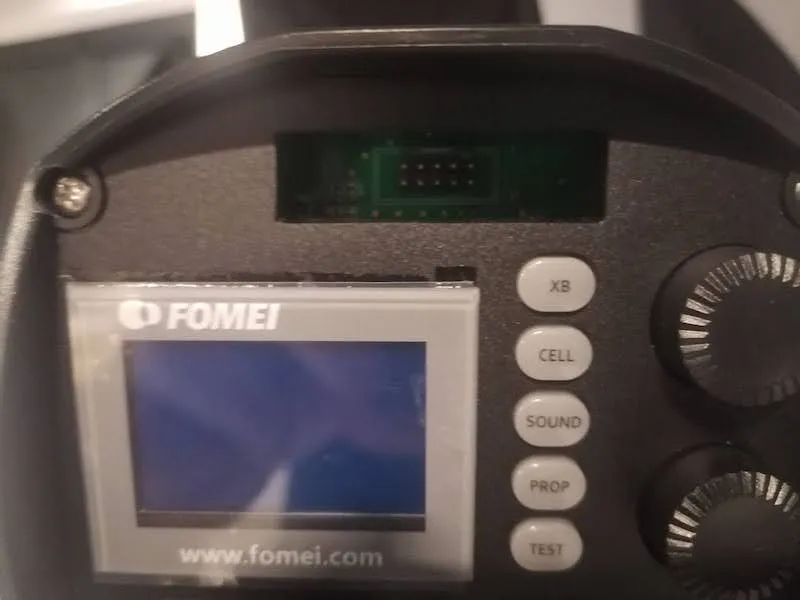
3.5.3. 次に、各ライトに受信機を挿入し、FOMEI ラベルの向きに注意します。


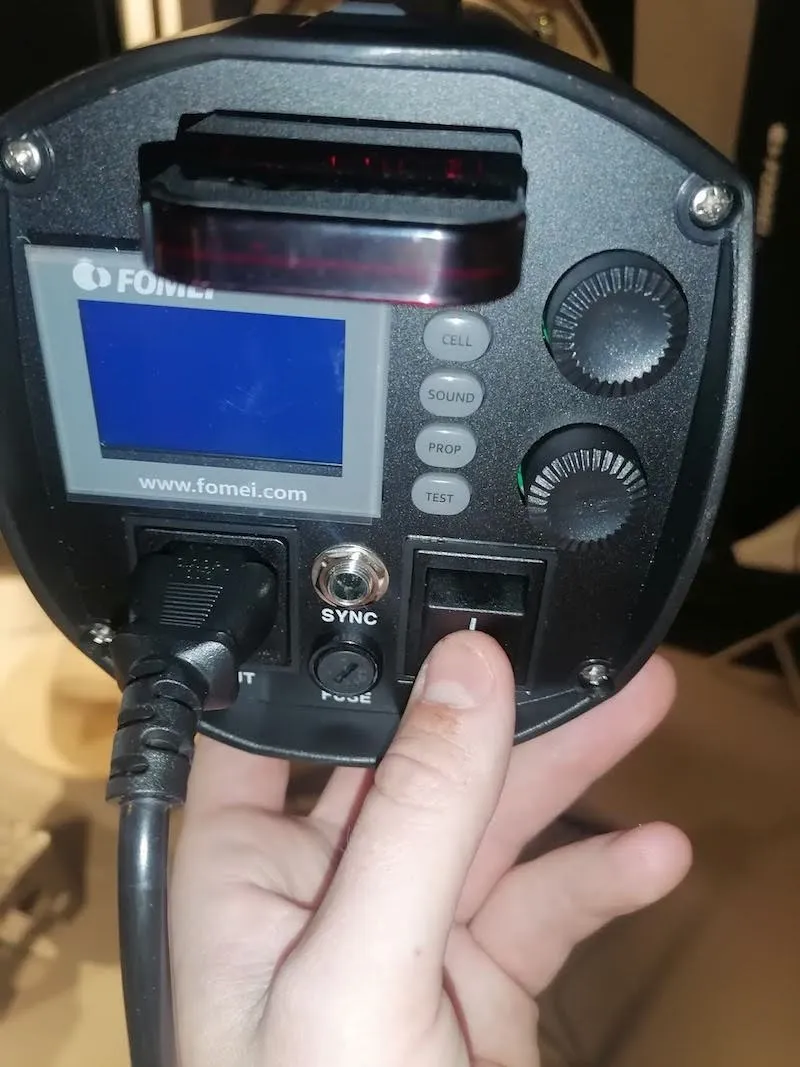
3.5.4. 電源ケーブルの自由端をライトから電源マルチソケットに差し込みます。


3.5.5. すべてのフラッシュライトの電源を入れます。

3.5.6. 次の推奨ライト設定で、ロボットの周囲にライトを物理的に配置します。
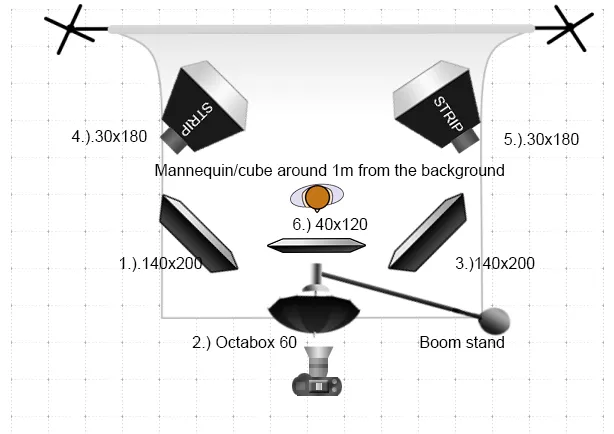
3.5.7. 推奨照明のセットアップのようにブームスタンドを設置する場合は、最初にブームスタンドを構築する必要があることに注意してください。ブームスタンドを作るには、三脚、1.5メートルの壁ブームポール、壁ブームセットが必要です。



また、ブームスタンドの構造については、以下の画像を参照してください。
a) 壁ブームポールクランプ:
b) ライトを支えるためにポールの端で重量のバランスをとる:

c) 構築されたブームスタンドの図示図:

4. PhotoRobot _Controlsソフトウェア
ソフトウェアPhotoRobot _Controlsアプリは、Cube V5 / V6 / Compactロボットワークステーション全体を制御できます。これには、すべてのロボット、カメラ、照明のリモートコントロールが含まれます。このソフトウェアはワークフローを管理し、後処理の分野で効果的な自動化に必要な機能を提供します。
PhotoRobot _Controlsアプリソフトウェアは、PhotoRobotアカウントからダウンロードできます。機械の納品には含まれていません。PhotoRobot _Controlsアプリソフトウェアは、本機とは別に購入します。
さらに、ソフトウェアアプリケーションを起動した後、インターフェイスが「ウィザードモード」で自動的に起動する可能性があることに注意してください。ウィザード モードは、簡略化されたユーザー インターフェイスです。例えば、バーコードをスキャンして物体を識別し、キャプチャと後処理シーケンスを自動的に開始することができます。
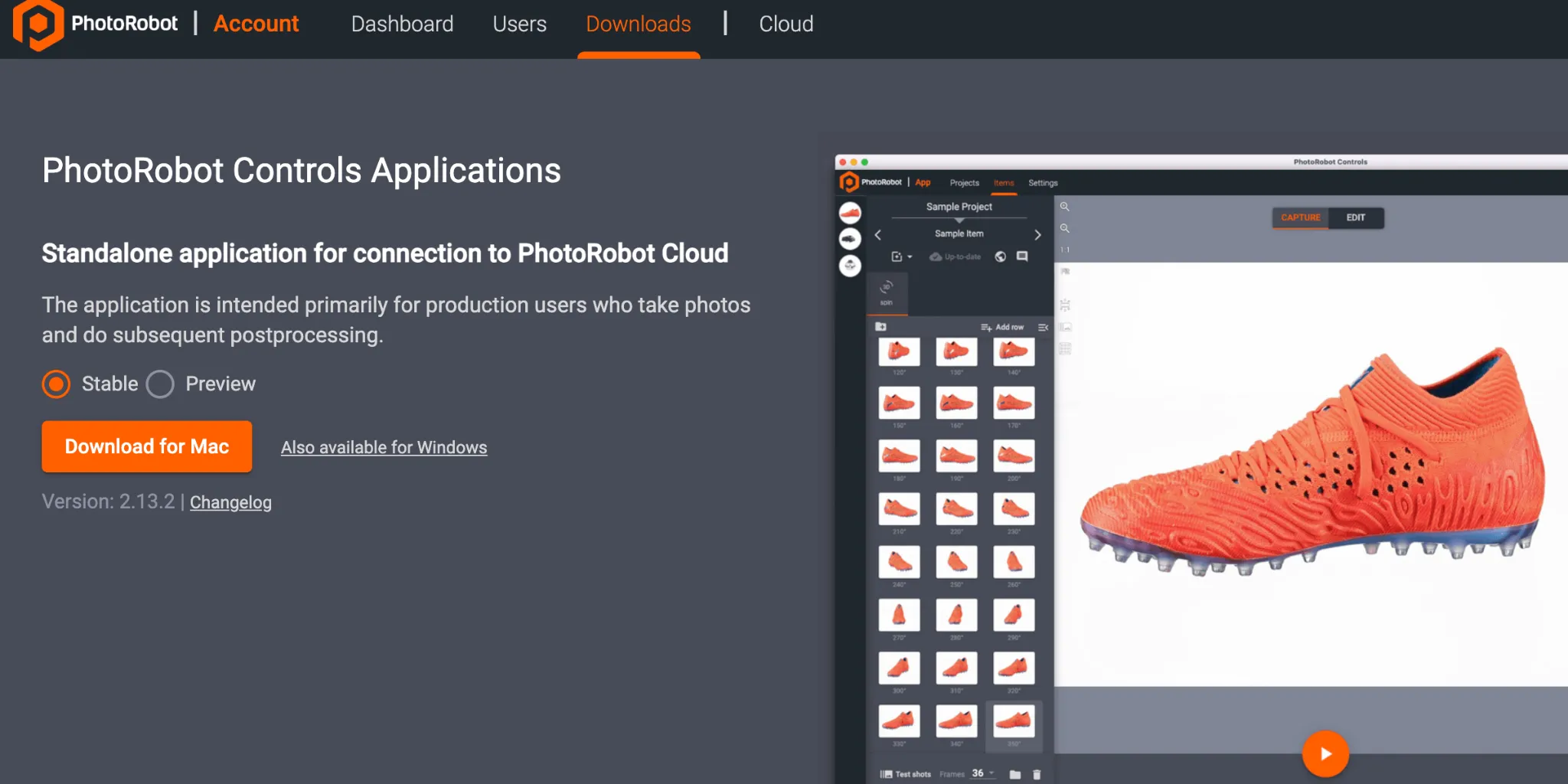
手記: CAPP の 安定版 と プレビュー版 はどちらも、インストーラーウィザードからダウンロードできます。安定版には最新バージョンの CAPP が含まれており、頻繁にバージョンがリリースされます。一方、CAPPのプレビューバージョンでは、開発から数日以内に安定版に移行する最新の機能と修正への早期アクセスが提供されます。これにより、安定版で報告されたほとんどの問題はプレビュー版ですでに解決されているため、ユーザーはサポートに連絡する前にプレビュー版で発生した問題をテストできます。ただし、プレビュー バージョンは、安定性が重要な要素である運用環境での使用には推奨されないことに注意してください。プレビュー バージョンは開発中ですが、まだ不完全な機能や未解決のバグが含まれている可能性があります。
大事な:古いバージョンの CAPP は、データベースが破損するリスクがあるため、顧客またはパブリック配布を目的としていません。古いバージョンのCAPPは、社内開発または非常に特殊なユースケースのために、認定されたPhotoRobot技術者のみがアクセスできます。CAPP の最新の安定版とプレビュー版を見つけるには、CAPP の最新のダウンロードバージョンを参照してください。
PhotoRobot _Controlsアプリのサポートやトラブルシューティングについては、「PhotoRobotはじめに」を参照してください。
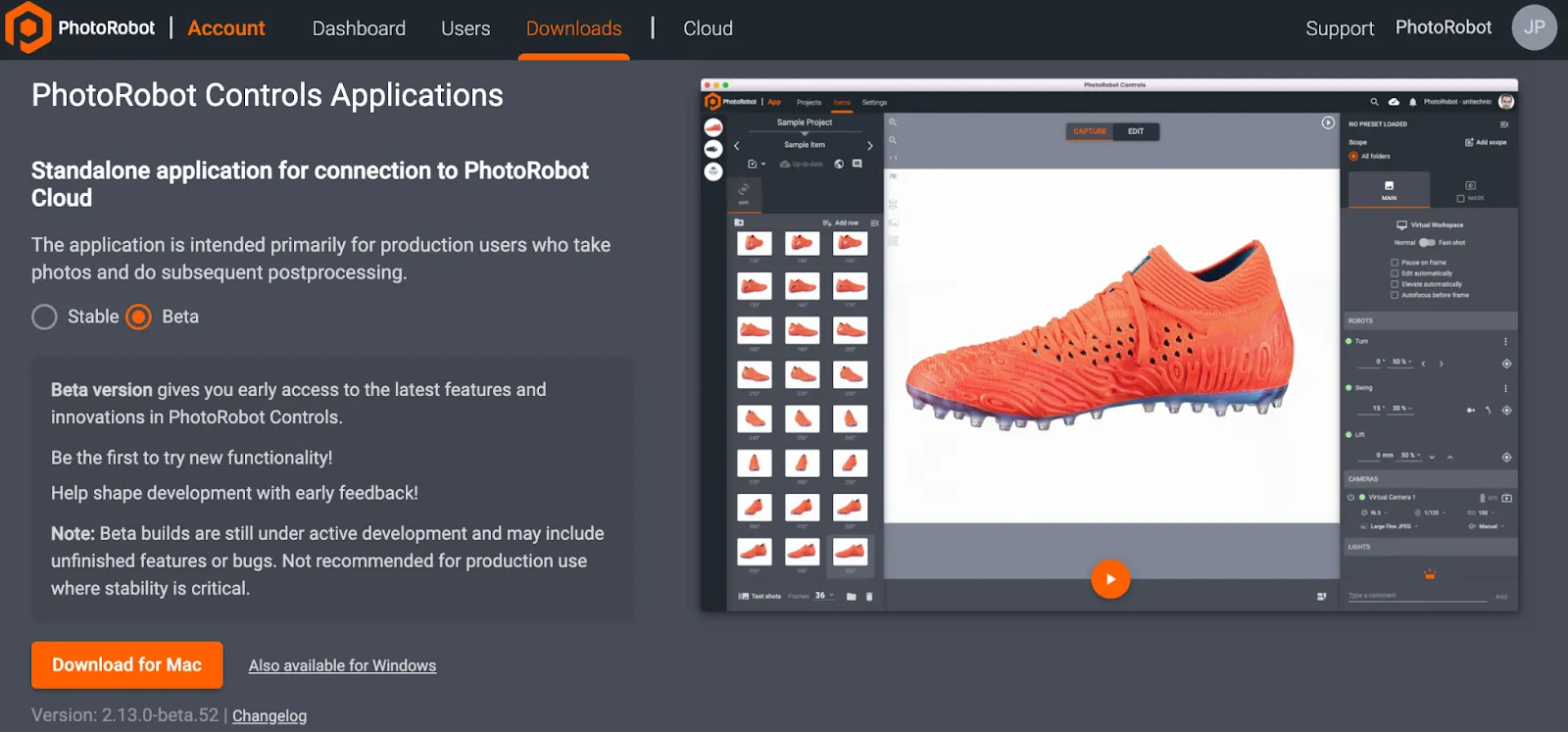
5. 情報ラベル
5.1. シンボルの概要
5.2. キューブコンパクトラベル



EOS Rebel シリーズ


EOS DSLR シリーズ


EOS M ミラーレス シリーズ


PowerShotシリーズ


クローズアップ/ ハンドヘルド

Canon EOS Rebel シリーズは、安定した画質、直感的なコントロール、多彩な機能を備えた、初心者向けのデジタル一眼レフカメラを提供します。写真愛好家に最適なこれらのカメラは、信頼性の高いオートフォーカス、バリアングルタッチスクリーン、フルHDまたは4Kビデオ録画を提供します。
接続
解像度(MP)
解決
Canon EOS DSLR シリーズは、高品質の画像、高速オートフォーカス、および汎用性を提供し、写真とビデオ制作の両方に最適です。
接続
解像度(MP)
解決
キヤノンEOS Mミラーレスシリーズは、コンパクトなデザインとデジタル一眼レフのようなパフォーマンスを兼ね備えています。交換レンズ、高速オートフォーカス、高品質イメージセンサーを備えたこれらのカメラは、画質を犠牲にすることなく携帯性を求める旅行者やコンテンツ制作者に最適です。
接続
解像度(MP)
解決
キヤノンのPowerShotシリーズは、カジュアルなシューターや愛好家のためのコンパクトでユーザーフレンドリーなカメラを提供します。シンプルなポイント&シュートから高度なズームカメラまで、さまざまなモデルを取り揃えており、利便性、安定した画質、手ぶれ補正や4Kビデオなどの機能を提供します。
接続
解像度(MP)
解決
キヤノンのクローズアップ&ハンドヘルドカメラは、詳細でクローズアップした写真やビデオ用に設計されています。コンパクトで使いやすく、精密なフォーカス、高解像度のイメージング、汎用性の高いマクロ機能を備えており、Vlog、製品写真、クリエイティブなクローズアップに最適です。


