PhotoRobot ロボットターンテーブルおよびロボットアーム V8 ユーザーガイド

以下のドキュメントは、ロボットアームV8拡張を備えたPhotoRobotロボットターンテーブルのユーザーマニュアルとして機能しています。このマニュアルは、最近デバイスを購入したPhotoRobotの顧客のみを対象としています。ロボットワークステーションの初期理解、基本的なテスト、そして最初の運用を促進することを目的としています。ロボットターンテーブル(ロボットアーム拡張)の詳細な説明、ワークステーションの概要、初使用のPhotoRobot使用・セットアップの説明が掲載されています。
大事な:PhotoRobotデバイスの初期設置は、必ず認可されたPhotoRobot権限者によって行われなければなりません。PhotoRobotの設置権限を持つ当局は、認定されたディストリビューター、または製造元の代表者です。
手記:初回使用前には、必ずPhotoRobotの安全情報と説明書を、デバイスに付属するマニュアルに加えてご確認ください。
ロボットアームV8拡張を備えたロボットターンテーブル
おめでとうございます。そしてPhotoRobotデバイスを購入していただきありがとうございます!PhotoRobotは、自動化写真における数十年にわたる実体験と革新を体現しています。独自のニーズに合わせた技術を提供すると同時に、PhotoRobotの顧客を支援する既成ソリューションのエコシステムを拡大しています。スタイリッシュで独創的な『PhotoRobot』は、スタジオを起動するたびにより簡単で迅速、そして安定した制作を約束します。PhotoRobotへようこそ。
1. ワークステーションの説明 - ロボットターンテーブルとアームV8
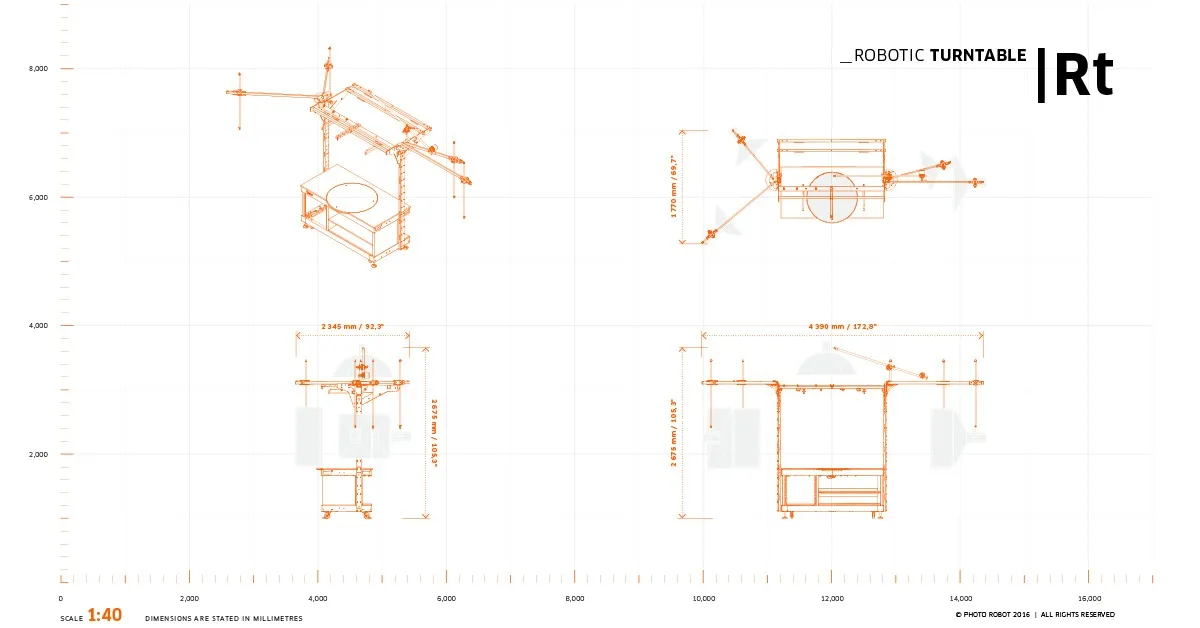
PhotoRobotのロボットターンテーブル(ロボットアームV8拡張付き)は、重い物体の360度製品撮影のための万能モーターターンテーブルとして機能します。ターンテーブルは、工具、エンジン、自動車部品、フライス盤などの重い小物、重い物体を支えます。ロボットアームV8と組み合わせることで、このワークステーションは360度スピンや多列3D撮影を簡素化・高速化します。ロボットアームは、カメラの動きと、ターンテーブル上の物体の回転に合わせて画像撮影や動きを同期させます。これにより、アイテムの周囲の複数行を360度素早く撮影でき、上下のビューも含めて、3D画像の効率的な撮影が可能です。

ロボットターンテーブルとロボットアームの組み合わせの主な特徴は以下の通りです:
- 耐摩耗性と200キログラムの高い耐荷力を持つヘビーデューティーターンテーブルです。
- ゼロ角度で写真を撮るためのテーブルの端に張り出したターンテーブルプレート。
- レーザー誘導による物体の位置決めで、常に回転の絶対中心を見つけること。
- ターンテーブルフレームの内部に照明とケーブルを一体化したマウント。
- リモートカメラ撮影は自動ターンテーブル回転と同期しています。
- カメラアームの振動なしに正確な軌道に沿って滑らかにカメラが動きます。
- ロボットアームの輸送とセットアップを容易にするためのドッキングステーション。
1.1. スタジオ統合 - ロボットターンテーブルとアームV8
スタジオ内では、ロボットターンテーブルは小さくも重い物体の撮影に対応し、ロボットアームV8は幅広いマウント範囲を持っています。これにより、ワークステーションを使用する際に三脚ヘッドやカメラの選択肢が多彩になります。一方、ロボットアームは頑丈な構造、正確な動き、異なるサイズの物体を捉えるための2種類のカメラアームを備えています。ロボットカメラアームを遠隔操作し、ターンテーブルやスタジオライトと同期させて画像撮影を完全に自動化し、非常にリアルな3D写真を作成することも可能です。
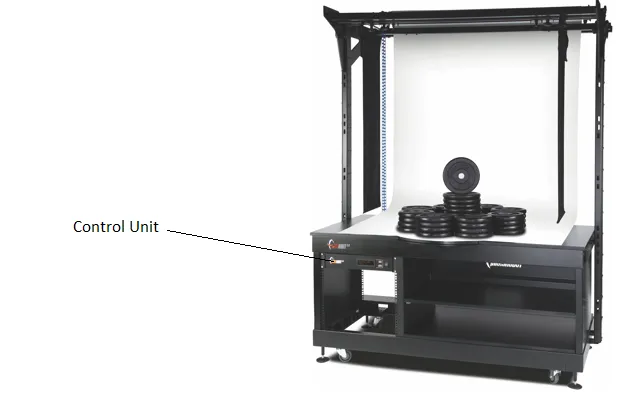
1.2. コントロールユニット - ロボットターンテーブルとアームV8
ロボットアームV8拡張を備えたロボットターンテーブルの主な部品の一つがコントロールユニットです。 コントロールユニット はシステムの不可欠な一部であり、ロボットターンテーブルとアームV8のすべての動きを制御・起動します。
コントロールユニットはロボットアームの物理的な一部ではありません。代わりに、制御ユニットはロボットターンテーブル内に物理的に設置されます。コントロールユニットは、ロボットターンテーブルの機械ボディの左前方にある専用のHDラックに設置されています。一方、ロボットアームV8は使用中、ロボットアームの隣にドッキングします。

1.3. ロボットアーム V8 拡張の概要
PhotoRobot Robotic Arm V8は、ほとんどのPhotoRobot回転ターンテーブルおよび自動360度写真用デバイスに対応しています。センターレステーブル、キューブ、ターニングプラットフォーム、CクラスターンテーブルなどのPhotoRobotロボットと組み合わせて機能します。

ロボット アーム V8 の主なコンポーネントは次のとおりです。
- コントロールユニット (アームおよび対応ターンテーブルの制御用別装置)
- カメラマウントシャンク (短片方、長片方、または両方)
- 機動性のために機械のベースに格納式の車輪を付けています。
- 対応のターンテーブルや機器を素早くセットアップできるドッキングステーション。
さらに、カメラアームは振動しないため、常に正確な軌道に沿って動きます。また、三脚ヘッドやカメラの選び方に柔軟性のある幅広い取り付けレンジがあり、輸送や設置も容易に楽しめる機能もあります。
手記: 組み立て、操作、初回使用に関する技術的な指示は、ロボット アームV8ユーザーマニュアル を参照してください。
2. PhotoRobotが初めて使われる以前
PhotoRobotを初めて使う場合は、まず技術的な観点からPhotoRobotのソリューションを理解する必要があります。PhotoRobotは、ハードウェアとソフトウェアのコンポーネントからなるモジュールユニットです。これには、PhotoRobotを操作するコンピューターが必要であり、同時にPhotoRobot自体も、それを動作させるコンピュータと同じネットワーク上で接続されている必要があります。さらに、ネットワークはクラウド上で動作するPhotoRobotサービスにアクセスするためにインターネットに接続する必要があります。
手記:ネットワーク接続の技術的な運用要件の適合を確認するため、ロボットワークステーションの初回使用および基本テストPhotoRobotを参照してください。
一般的に、以下の基本的な運用要件が存在します。
- 制御ユニットはローカルネットワークに接続しなければなりません。
- サービスGUIまたは_Controlsと呼ばれるオペレーターのソフトウェアを実行するには、コンピューターが必要です。
- コンピュータは、コントロールユニットと同じネットワーク経由で接続する必要があります。
- ネットワーク上に機能するインターネット接続が必要です。

PhotoRobotをネットワークに接続した後、電力配電システムのパラメータ(電圧や周波数など)をチェックします。これを行うには、コントロールユニットの背面にあるRJ45コネクターを使用します。
大事な: コントロールユニットの設定が基準に達していない場合は、まずセットアップしてください。そのためには、コントロールユニット背面にある手動電圧選択器を見つけ、RJ45コネクタを使ってイーサネットケーブルでネットワークに接続します。

次に、Arm V8搭載ロボットターンテーブルの動作に関する以下のネットワーク構成要件を満たしていることを確認してください。
- ネットワーク内の DHCP サーバーは必須です。
- TCPポート7777、7778通信を許可する必要があります。
- ポート 6666 での UDP ブロードキャストを許可する必要があります。
- インターネット接続は必須です。
- *.photorobot.com アクセスを許可する必要があります。
- as-unirobot.azurewebsites.net アクセスを許可する必要があります。
- PhotoRobotのLANへの有線接続を推奨します。
- 必要に応じてPhotoRobotネットワークの前提条件を参照してセットアップを確認してください。
- 電源プラグを電源ソケットに接続します。
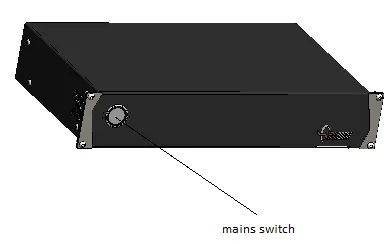
最後に、コントロールユニットの電源スイッチを押します。状態が変わると、点滅から点滅点灯に変わり、制御ユニットの運用準備が整ったことを示します。
2.1. LAN上でPhotoRobotのIPアドレスを検索
ネットワークの適切な設定後、LAN上でPhotoRobotのIPアドレスを検索し、特定する必要があります。これを行うために、PhotoRobot LocatorアプリはCAPPに直接統合されており、ネットワーク上のControl Unitsの検索と特定を容易にします。この機能にアクセスするには、最新バージョンのCAPPを使用していることを確認してください。
次に、CAPP内でネットワーク上のロボットを直接識別するには、CAPPのローカルバージョンを開き、設定に移動して、ロボット / 制御ユニットをクリックします。

ロボット/コントロールユニットメニューには、各ロボットの名前、ネットワーク、ユニット、バージョン、検出済み、識別という列が表示されます。ロボット名の左にある点が緑色の場合、オンライン状態です。ロボットフィールドをクリックすると、ロボットのウェブサイトインターフェースが開きます。これにより、ロボットのコントロールユニットのLEDライトが緑色に点滅し、識別が容易になります。
お客様がアプリの外部ダウンロードを必要とする場合、PhotoRobot LocatorはPhotoRobot Account Downloads内でiOSダウンロードも可能です。

注: PhotoRobot LocatorのAndroid版は廃止されました。
あるいは、MacOSまたはWindows用のFRFindコマンドラインユーティリティを使用して、ネットワークを検索し、PhotoRobot制御ユニットを識別することもできます。FRfindのダウンロードリンクは、PhotoRobotアカウントのダウンロードページからも見つけることができます。
その後、PhotoRobotデバイスを見つけたらIPアドレスをコピーし、URL形式で任意のウェブブラウザに貼り付けます。成功すれば、PhotoRobotのテスト用基本ユーザーインターフェースを表示するサービスGUIが起動します。
2.2. ロボットターンテーブルとアームV8の基本テスト
サービスGUIを開いた状態で、シンプルなユーザーインターフェース操作を使ってまず機械のモーターを起動します。次に、ポーズボタンの横にある左または右の矢印を使ってプラットフォームを任意の角度に回転させ、ロボットアームの動きを試します。デバイスが望む角度に動くと、ワークステーションは通常の動作が可能になります。

- エンジンを始動させ(矢印1)、回転を試みる(矢印2)。
- ロボットが動作指示に従っていれば、PhotoRobotデバイスは通常の動作が可能になります。
3. PhotoRobot _Controlsソフトウェア概要
ロボットターンテーブル(ロボットアームV8拡張ワークステーション)のリモートコントロールは、すべてのロボット、カメラ、照明を含むソフトウェアPhotoRobot _Controlsを通じて行います。このソフトウェアはワークフローを管理し、後処理における効果的な自動化に必要なすべての機能を提供します。

重要:PhotoRobot _Controlsは機械の配送に含まれていません。別途購入し、PhotoRobotアカウントから入手可能です。
PhotoRobotコントロールアプリソフトウェアのインストールおよび使用に関する詳細な手順やサポートについては、PhotoRobot Getting Startedユーザーマニュアルをご参照ください。
4. 情報ラベル
4.1. シンボル概要

4.2. 機械および部品ラベル
特定の機械や部品に関する情報ラベルについては、PhotoRobotの安全情報と説明書の「情報ラベル(3.1)」セクションを参照してください。


EOS Rebel シリーズ


EOS DSLR シリーズ


EOS M ミラーレス シリーズ


PowerShotシリーズ


クローズアップ/ ハンドヘルド

Canon EOS Rebel シリーズは、安定した画質、直感的なコントロール、多彩な機能を備えた、初心者向けのデジタル一眼レフカメラを提供します。写真愛好家に最適なこれらのカメラは、信頼性の高いオートフォーカス、バリアングルタッチスクリーン、フルHDまたは4Kビデオ録画を提供します。
接続
解像度(MP)
解決
Canon EOS DSLR シリーズは、高品質の画像、高速オートフォーカス、および汎用性を提供し、写真とビデオ制作の両方に最適です。
接続
解像度(MP)
解決
キヤノンEOS Mミラーレスシリーズは、コンパクトなデザインとデジタル一眼レフのようなパフォーマンスを兼ね備えています。交換レンズ、高速オートフォーカス、高品質イメージセンサーを備えたこれらのカメラは、画質を犠牲にすることなく携帯性を求める旅行者やコンテンツ制作者に最適です。
接続
解像度(MP)
解決
キヤノンのPowerShotシリーズは、カジュアルなシューターや愛好家のためのコンパクトでユーザーフレンドリーなカメラを提供します。シンプルなポイント&シュートから高度なズームカメラまで、さまざまなモデルを取り揃えており、利便性、安定した画質、手ぶれ補正や4Kビデオなどの機能を提供します。
接続
解像度(MP)
解決
キヤノンのクローズアップ&ハンドヘルドカメラは、詳細でクローズアップした写真やビデオ用に設計されています。コンパクトで使いやすく、精密なフォーカス、高解像度のイメージング、汎用性の高いマクロ機能を備えており、Vlog、製品写真、クリエイティブなクローズアップに最適です。


