PhotoRobot バーチャルキャットウォーク初使用ガイド

このユーザーマニュアルは、PhotoRobotバーチャルキャットウォークの基本的な理解と機能運用のための技術情報を提供します。最近PhotoRobotのデバイスを購入した顧客を支援し、新技術のオンボーディングを効率化することを目的としています。これには、バーチャルキャットウォークの一般的なデバイス概要、ネットワークへの接続手順、システムの初回使用手順が含まれます。
手記:初回使用前には、必ずPhotoRobotの安全情報と説明書を、デバイスに付属するマニュアルに加えてご確認ください。
大事な:PhotoRobotデバイスの初期設置は、必ず認可されたPhotoRobot権限者によって行われなければなりません。PhotoRobotの設置権限を持つ当局は、認定されたディストリビューター、または製造元の代表者です。
PhotoRobotキャットウォークの初回使用ガイド
ありがとうございます。そしてPhotoRobotバーチャルキャットウォークのご購入おめでとうございます。あなたのPhotoRobotデバイスは、自動化写真における数十年にわたる実体験、洞察、革新を体現しています。そのデザインは、あなたと各お客様のユニークなビジネスを念頭に置いています。PhotoRobotは幅広いユースケースをサポートするためにモジュール化されており、各ケースがPhotoRobotエコシステム全体に利益をもたらす役割を果たしています。以下のドキュメントを使ってPhotoRobotソリューションに慣れ、デバイスの初回使用手順を確認してください。
問題が発生した場合は、ハードウェア、ロボット、カメラ、照明、編集、ポストプロダクションに関する一般的な問題の解決策については、PhotoRobot Troubleshootingを参照してください。
1. デバイス説明 - PhotoRobot バーチャルキャットウォーク
PhotoRobotのバーチャルキャットウォークは、ファッション写真とビデオのための無限360度ランウェイとなります。この装置は、360度回転する回転プラットフォームの上に置かれたトレッドミルで構成されています。同時に、プラットフォームの周囲にはカメラが設置され続け、飛行するカメラ効果のある写真や映像が撮影されます。このワークステーションは、モデルを使った360度製品撮影や、ベルトが作動していない時の中〜大型の物体の撮影に適しています。また、プラットフォームからの出入りも容易で、移動中の安定性を高めるために速度調整が可能です。

PhotoRobotキャットウォークの主な技術的特徴は以下の通りです:
- カスタマイズ可能なムーブメントコントロール(ターンテーブルの回転速度とトレッドミル速度を0〜10km/hまでリモートで調整可能で、どのモデルにも完璧に対応)。
- 容易な出入り(回転プラットフォームの広いプレートは支持で固定され、安定性と安全性が向上しています)。
- すべてを一か所にまとめて(移動する必要もありません)。
- 調整可能なレベル(キャットウォークを直接床に設置して作業エリアと同じ高さにすることも可能です)。
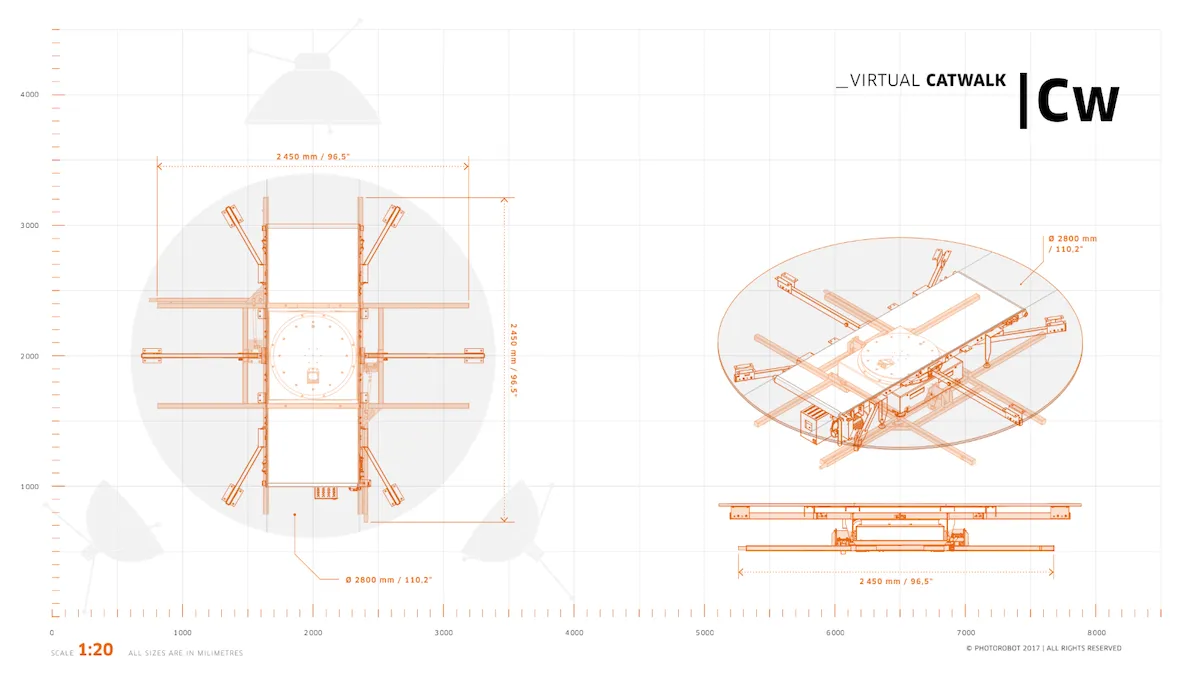
1.1 デバイス概要 - バーチャルキャットウォーク
PhotoRobotバーチャルキャットウォークは7×7メートルのスペースに収まり、ターンプレートの回転力学とウォーキングベルトの組み合わせをカバーしています。これにより、2方向の移動が可能になります。ウォークオントレッドミルのようなベルトの動きと、ベルトが作動している間も同時に回転できる回転プラットフォームがあります。一方で、移動方向と速度を完全に制御し、モバイルエッジサポートにより、デバイス運用時の安全性と安定性の両方が実現します。

1.2. バーチャルキャットウォークの主な構成要素
1.2.1. マシン内の巨大な駆動モーターにより、トレッドミルの0〜10km/hの速度調整が可能となり、プラットフォームの360度回転を駆動します。

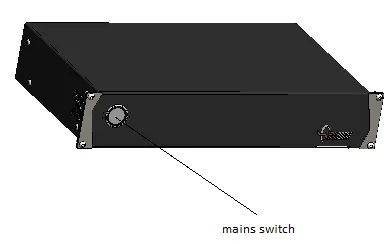
1.2.2. コントロールユニットの位置はキャットウォーク内ではないことに注意してください。代わりに、コントロールユニットは機械とは別に設置されており、通常は専用のPhotoRobot HDラックケースの中に収められています。
1.2.3. ビデオ撮影に使われていない場合、ベルトを取り外してターンテーブルで360度製品写真撮影を行うことが可能です。これはRotoPowerモードで可能であり、オプションのPhotoRobotロボットアーム拡張と組み合わせることでも可能です。

2. PhotoRobotのキャットウォーク初使用前に
PhotoRobotを初めて使用する前に、PhotoRobotソリューションの性質を理解する必要があります。PhotoRobotは技術的にはハードウェアとソフトウェアのコンポーネントからなるモジュールユニットです。これには、PhotoRobotがそれを運用するコンピュータと同じネットワークに接続している必要があります。
大事な:PhotoRobotをネットワークに接続する技術的な運用要件や手順については、必ずPhotoRobotの初回使用および基本テストを参照してください。
一般的に、以下の作業前提条件を満たす必要があります。
- 制御ユニットはローカルネットワークに接続しなければなりません。
- コンピュータは、サービス GUI または _Controls と呼ばれるオペレーターのソフトウェアを実行する必要があります。
- コンピュータは、コントロールユニットと同じネットワーク経由で接続する必要があります。
- ネットワーク上で機能するインターネット接続が必要です。

さらに、電力配電システムのパラメータ(例:電圧や周波数)が適合している必要があります。これを行うには、コントロールユニットの背面にあるRJ45コネクターを使用します。コントロールユニットの設定が基準に達していない場合は、まずセットアップしてください。これを行うには、コントロールユニット背面にある手動電圧セレクターを見つけてください。その後、RJ45コネクタを使ってイーサネットケーブルで制御ユニットをネットワークに接続します。

バーチャルキャットウォークの運用には以下のネットワーク構成要件があります。
- ネットワーク内の DHCP サーバーは必須です。
- TCPポート7777、7778通信を許可する必要があります。
- ポート 6666 での UDP ブロードキャストを許可する必要があります。
- インターネット接続は必須です。
- *.photorobot.com アクセスを許可する必要があります。
- as-unirobot.azurewebsites.net アクセスを許可する必要があります。
- 適切なセットアップや必要に応じてトラブルシューティングを行うには、PhotoRobot Networking Prerequisites and Configurationを参照してください。
- 電源プラグを電源ソケットに接続します。
最後に、コントロールユニットの電源スイッチを押します。状態が変わると、点滅が止まり連続点滅灯となり、制御ユニットの運用準備が整ったことを示します。
2.1. LAN上でPhotoRobotのIPアドレスを検索
Virtual CATWALKおよびその他のPhotoRobotデバイスのIPアドレスを特定するために、PhotoRobot LocatorアプリはCAPPに直接統合されています。これにより、外部アプリケーションを使用せずに、ネットワーク上のコントロールユニットをより簡単に検索および識別できます。 この機能にアクセスするには、最新バージョンのCAPPを使用していることを確認してください。
次に、CAPP内でネットワーク上のロボットを直接識別するには、CAPPのローカルバージョンを開き、設定に移動して、ロボット / 制御ユニットをクリックします。

ロボット/コントロールユニットメニューには、各ロボットの名前、ネットワーク、ユニット、バージョン、検出済み、識別という列が表示されます。ロボット名の左にある点が緑色の場合、オンライン状態です。ロボットフィールドをクリックすると、ロボットのウェブサイトインターフェースが開きます。これにより、ロボットのコントロールユニットのLEDライトが緑色に点滅し、識別が容易になります。
お客様がアプリの外部ダウンロードを必要とする場合、PhotoRobot LocatorはPhotoRobot Account Downloads内でiOSダウンロードも可能です。

注: PhotoRobot LocatorのAndroid版は廃止されました。
あるいは、MacOSまたはWindows用のFRFindコマンドラインユーティリティを使用して、ネットワークを検索し、PhotoRobot制御ユニットを識別することもできます。FRfindのダウンロードリンクは、PhotoRobotアカウントのダウンロードページからも見つけることができます。
その後、PhotoRobotデバイスを見つけたら、IPアドレスをコピーし、PhotoRobotのIPアドレスをURL形式で任意のWebブラウザに貼り付けます。成功すると、サービスGUIが起動し、PhotoRobotをテストするための基本的なユーザーインターフェースが表示されます。
2.2. PhotoRobotキャットウォークの電源
デバイスのサービスGUIで、次に緑色の電源ボタン「 Motor ON」を使ってモーターをオンにします。

2.3. PhotoRobotキャットウォークの基本テストを実施
最後に、PhotoRobotが完全に動作しているかどうかをテストするには、サービスGUIインターフェイスコントロールを使用して、プラットフォームを任意の角度に回転させます。

- エンジンを始動(矢印1)、回転を試みる(矢印2)。
- ロボットが動作指示に従っていれば、PhotoRobotデバイスは通常の動作が可能になります。
3. PhotoRobot _Controlsソフトウェア
ソフトウェアPhotoRobot _Controlsアプリは、仮想キャットウォークロボットワークステーション全体を制御します。これには、すべてのロボット、カメラ、照明のリモートコントロールが含まれます。このソフトウェアはワークフローを管理し、後処理の分野で効果的な自動化に必要な機能を提供します。

重要:PhotoRobot _ControlsアプリソフトウェアはPhotoRobotアカウントからダウンロード可能です。機械の配送には含まれていません。機械とは別に購入されます。
手記:ソフトウェアの使用に関する詳細情報や技術的な指示については、PhotoRobot Starting PhotoRobot _Controlsを参照してください。
4. 情報ラベル
4.1. シンボル概要

4.2. 機械および部品ラベル
特定の機械や部品のラベルについては、PhotoRobot Safety Information and Instructionsの「Information Labels (3.1.)」セクションを参照してください。


EOS Rebel シリーズ


EOS DSLR シリーズ


EOS M ミラーレス シリーズ


PowerShotシリーズ


クローズアップ/ ハンドヘルド

Canon EOS Rebel シリーズは、安定した画質、直感的なコントロール、多彩な機能を備えた、初心者向けのデジタル一眼レフカメラを提供します。写真愛好家に最適なこれらのカメラは、信頼性の高いオートフォーカス、バリアングルタッチスクリーン、フルHDまたは4Kビデオ録画を提供します。
接続
解像度(MP)
解決
Canon EOS DSLR シリーズは、高品質の画像、高速オートフォーカス、および汎用性を提供し、写真とビデオ制作の両方に最適です。
接続
解像度(MP)
解決
キヤノンEOS Mミラーレスシリーズは、コンパクトなデザインとデジタル一眼レフのようなパフォーマンスを兼ね備えています。交換レンズ、高速オートフォーカス、高品質イメージセンサーを備えたこれらのカメラは、画質を犠牲にすることなく携帯性を求める旅行者やコンテンツ制作者に最適です。
接続
解像度(MP)
解決
キヤノンのPowerShotシリーズは、カジュアルなシューターや愛好家のためのコンパクトでユーザーフレンドリーなカメラを提供します。シンプルなポイント&シュートから高度なズームカメラまで、さまざまなモデルを取り揃えており、利便性、安定した画質、手ぶれ補正や4Kビデオなどの機能を提供します。
接続
解像度(MP)
解決
キヤノンのクローズアップ&ハンドヘルドカメラは、詳細でクローズアップした写真やビデオ用に設計されています。コンパクトで使いやすく、精密なフォーカス、高解像度のイメージング、汎用性の高いマクロ機能を備えており、Vlog、製品写真、クリエイティブなクローズアップに最適です。


